 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










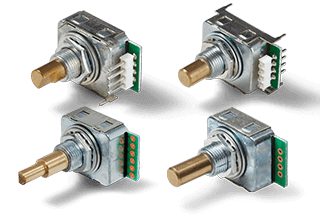
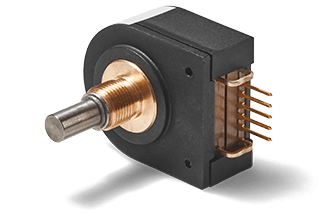
Drehimpulsgeber
Für die manuelle Eingabe mit inkrementeller Schnittstelle
Ratgeber Drehimpulsgeber
Inhalt
5 Tipps für den richtigen Handeinsteller
Bei der Auswahl des geeigneten Sollwertgebers muss sich der Anwender über die grundsätzlichen Anforderungen an das Produkt im Klaren sein.
1. Haptische und mechanische Anforderungen sind:
- Mit oder ohne Rastung
- Das Betätigungsmoment
- Das Rastmoment
- Die Betätigungskraft auf den Taster
- Der Tastweg
- Mit Endanschlag, ohne Endanschlag
- Der Wellendurchmesser
- Die Sensorbefestigung in der Applikation
2. Zu den primären elektrischen Anforderungen gehören:
- Die Versorgungsspannung
- Der Stromverbrauch
- Das Ausgangssignal, die Ausgangselektronik
- Eine elektrische Redundanz
- Mit Taster [ja/nein]
- Max. Spannung/Strom des Tasters
3. Umwelteigenschaften:
- Die Betriebstemperatur
- Der IP Schutzgrad
- Beständigkeit gegenüber Schocks/Vibrationen
4. Lebensdauer:
- Anzahl der Wellenbetätigung
- Anzahl der Tasterbetätigungen
5. Preis:
- Preisobergrenze des Handeinstellers
- Preisobergrenze für den Knopf
Was ist ein Drehimpulsgeber?
Drehimpulsgeber gehören zur Gruppe der Inkrementalgeber (siehe dazu den Ratgeber). Sie werden jedoch hauptsächlich als manuelle Sollwertgeber eingesetzt. Dabei werden die Sollwerte durch eine manuelle Drehbewegung der Drehgeberachse (im oder gegen den Uhrzeigersinn) als elektrische Signale in Form von Inkrementen ausgegeben. Unser Portfolio an Drehimpulsgebern umfasst ausschließlich Sollwertgeber mit optoelektronischem Sensorprinzip. Sie können zusätzliche Merkmale wie integrierte Taster und/oder sogenannte Rastungen besitzen. Ist in einem Drehimpulsgeber ein Taster integriert, so wird bei axialer Krafteinwirkung auf die Welle ein Schaltkontakt geschlossen. Bei der Option Rastung ändert sich das Drehmoment bei Betätigung der Welle in äquidistanten Schritten.
Häufige Anwendungsgebiete für Drehimpulsgeber sind:
- Ändern der Lautstärke, beispielsweise in AV Receivern, CAR-Audio-Systemen
- Scrollen durch Menüs
- Einstellen numerischer Werte
- Bestätigen einer Funktion oder von Sollwerten
Optisches Abtastprinzip
Drehimpulsgeber sind in der Regel optische Inkrementalgeber und liefern daher ihr Nutzsignal in Form von Impulsen. Zur Drehrichtungserkennung liefern Drehimpulsgeber am Ausgang zwei elektrische Signale, die der Kanäle A und B, deren Signale um 90° phasenverschoben sind. Aus dem Verhältnis der Signale A und B zueinander wird in einer Auswerteeinheit erkannt, ob die Achse des Drehimpulsgebers im Uhrzeigersinn oder gegen den Uhrzeigersinn gedreht wird.
Optische Sensortechnologien bieten eine Reihe von Vorteilen. Es handelt sich um ein kontaktloses Messprinzip, d.h. die Messwertübertragung zwischen Messwertaufnehmer und Messwerterfassung erfolgt berührungslos. Für mehr Details zu optischen Inkrementalgebern siehe dessen Ratgeber.
Taster
Viele Drehimpulsgeber können mit einem integrierten Taster bestellt werden, der durch eine axiale Kraft (Druck) auf die Welle betätigt wird. Die Schalter arbeiten ausschließlich als Schließer (engl. normally open, N.O.). Dies bedeutet, dass der Schaltkontakt bei Betätigung geschlossen und im Ruhezustand offen ist. Die Schaltfunktion wird durch einen Sprungschalter/Schnappschalter unter der Welle realisiert, der im Volksmund auch als Knackfroschschalter bezeichnet wird.

Für die zulässigen elektrischen Kennwerte des Tasters sind folgende Auswahlkriterien zu beachten:
- Maximal zulässige Spannung, die am Taster anliegt
- Maximal zulässiger Strom, der über den Taster fließt
- Kontaktwiderstand des Tasters
- Hat der Taster einen Massebezug oder nicht
Die meisten Parameter unterscheiden sich je nach Drehimpulsgeber, wobei die maximal zulässige Spannung des Tasters für alle MEGATRON Drehimpulsgeber 12 V/DC beträgt.
Die folgenden Auswahlkriterien sind für die mechanischen Kennwerte des Tasters zu beachten:
- Lebensdauer (Anzahl der Betätigungen)
- Tastweg [mm]
- Betätigungskraft [N]
- Prellzeit [ms]
Die Prellzeit ist die Zeit, die ein elektromechanischer Sprungschalter benötigt, bis der Schaltkontakt vollständig geschlossen ist.
Rastung

Drehimpulsgeber mit Rastung geben dem Bediener eine haptische Rückmeldung. Diese Rückmeldung erfolgt durch eine fühlbare periodische Änderung des mechanischen Widerstandes während der Drehung. Rastungen sind bei Drehimpulsgebern nur als Option erhältlich. Meist sind die Anzahl der Rastpositionen und das Rastmoment wählbar. Unter Rastung versteht man die Änderung des Betätigungsmoments in äquidistanten Schritten während der Drehung der Welle. Die Welle rastet immer zwischen zwei Stellungen ein. Nur durch Aufbringen einer größeren Kraft kann die Position verändert werden. Die Rastposition wird als „Detent Position“ bezeichnet. Elektrisch findet zwischen zwei aufeinanderfolgenden Rastpositionen oder während des Wechsels der Rastposition eine Zustandsänderung der Signalausgangspegel statt. Hierzu wird eine Auswerteeinheit verwendet.
Die Nutzung der Impulse kann beispielsweise für folgende Anwendungen erfolgen:
- Allgemein zum Erhöhen oder Verringern eines numerischen Wertes pro Rastposition
- Zur Navigation in einer Menüstruktur durch Drehbewegung - jede Rastposition entspricht einem Wechsel der Menüposition
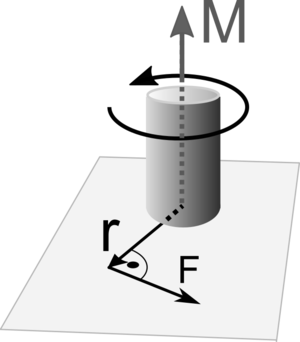
Die zum Überwinden der Rastposition erforderliche Kraft wird in den Datenblättern auch als Rastmoment bezeichnet. Je größer das Rastmoment ist, desto größer ist die Kraft, die aufgewendet werden muss, um bei gleichbleibendem Durchmesser des Einstellknopfes die Welle des Drehimpulsgebers zu drehen und damit den Sollwert zu ändern.
Der Sinn eines erhöhten Rastmomentes ist:
- Ein unbeabsichtigtes Verdrehen der Welle und damit eine unbeabsichtigte Sollwertänderung zu verhindern
- Um den Zusammenhang zwischen dem Durchmesser des Einstellknopfes und dem Rastmoment auszugleichen. Je größer der Durchmesser des Einstellknopfes, desto länger ist der senkrecht zur Wellenmittelachse wirkende Hebel (r) und desto geringer ist die Kraft (F), die erforderlich ist, um bei gleichem Rastmoment den Einstellknopf und damit die Achse des Drehimpulsgebers zu verdrehen.
Schmitt-Trigger

Viele Drehimpulsgeber verfügen über einen integrierten Schmitt-Trigger. Der Schmitt-Trigger ist eine elektronische Schaltung. Das Datenblatt jedes Drehimpulsgebers enthält ein (Block-)Schaltbild der Drehgeberelektronik. Daraus ist ersichtlich, ob der Drehimpulsgeber über einen integrierten Schmitt-Trigger verfügt.
Mit dieser Schaltung wird ein Zustandswechsel des Ausgangssignals zwischen zwei festen Pegelzuständen Low/High und umgekehrt realisiert. Dazu müssen sich die Signalamplituden am Signaleingang des Schmitt-Triggers in einem bestimmten Bereich ändern, der als Schaltschwelle (engl. „treshold level“) bezeichnet wird. Allgemein gilt:
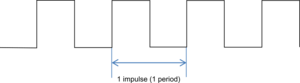
- Ein Schmitt-Trigger gibt immer Rechtecksignale aus
- Ändert sich die Frequenz des Eingangssignals, so ändert sich auch die Frequenz des Ausgangssignals
- Die Signalformen der Eingangssignale am Schmitt-Trigger können unterschiedlich sein. Damit eine Pegeländerung am Signalausgang des Schmitt-Triggers erfolgt, muss sich die Signalamplitude des Eingangssignals im Bereich der Schaltschwellen ändern
Die Verwendung der Schmitt-Trigger-Schaltung hat folgende Vorteile:
- Die Inkremente werden am Signalausgang als klar definierte Rechtecksignale ohne Verschliff der Signalflanken dargestellt.
- Die Signalanstiegs- und -abfallzeit (engl. rise and fall time) zwischen den Pegelzuständen (high/low) wird deutlich reduziert.
- Die Alterungseigenschaften von Leuchtdioden im Dauerbetrieb führen zu einer Abnahme der Lichtintensität während der Betriebsdauer bzw. die Alterung des optischen Systems selbst führt zu einer Abnahme der Signalpegel am Ausgang der Fototransistoren des Drehimpulsgebers und damit zu einer Veränderung der Schalteigenschaften. Um diese Alterungseffekte wirksam zu kompensieren, wird ebenfalls der Schmitt-Trigger eingesetzt.
Ein Nachteil von Drehimpulsgebern mit integriertem Schmitt-Trigger kann die etwas höhere Stromaufnahme sein. Dieser negative Begleiteffekt wird häufig durch den Einsatz von Halbleitern auf CMOS-Basis im Drehimpulsgeber kompensiert, die insgesamt eine geringere Stromaufnahme aufweisen.
Rastmechanik
Auf dem Markt gibt es im Allgemeinen drei Verfahren, um eine Rastung durch einen Mechanismus zu erreichen:
- Federstahl
- Metallkugel & Spiralfeder
- Magnetisches Polrad
Eine gute Rastmechanik zeichnet sich durch weitgehend unveränderte Rasteigenschaften über die gesamte Lebensdauer des Drehimpulsgebers aus. In der Praxis bedeutet dies, dass bei einer spezifizierten Lebensdauer von 1 Mio. Wellenumdrehungen und 80 manuellen Sollwertänderungen pro Tag die Schwelle von 1 Mio. Betätigungen erst nach mehr als 34 Jahren überschritten wird.
80 manuelle Sollwertänderungen pro Tag an 365 Tagen im Jahr sind für die meisten Anwendungen bereits viel zu hoch. Untersuchungen haben gezeigt, dass Drehimpulsgeber während ihrer Lebensdauer im Durchschnitt deutlich weniger als 100.000 Mal betätigt werden. Realistisch sind nur einige 10.000 Betätigungen während der Lebensdauer einer Applikation.
Federstahl
Bei Rastmechanismen aus Federstahl rastet eine Federplatte in Vertiefungen des Gehäuses ein, deren Lauffläche häufig gefettet ist. Diese Rastmechaniken zeigen oft ein stark abfallendes Rastverhalten in Abhängigkeit von der Wellenbetätigung und sind meist bei Drehimpulsgebern mit eingeschränkter Lebensdauer anzutreffen.
Metallkugel & Spiralfeder
Der Rastmechanismus besteht aus zwei Metallkugeln, die gegenüberliegend der Welle im Inneren angeordnet sind. Zwei Spiralfedern drücken die Kugeln auf einen Zahnkranz, der auf der Welle montiert ist. Die Zähne des Zahnkranzes sind mit einem Schmiermittel versehen. Dieses Prinzip wurde von uns maßgeblich entwickelt und kontinuierlich verbessert. Es bietet optimale Eigenschaften hinsichtlich kompakter Bauweise, Produktlebensdauer und hoher Wirtschaftlichkeit.
Magnetisches Polrad
Eine magnetische Polrad-Rastung ist eine technisch hochwertige Lösung, die eine hohe Produktlebensdauer bei gleichbleibendem Rastverhalten bietet. Auf einer Drehgeberwelle ist ein kreisförmiger Permanentmagnet (Polrad) angebracht, der in gleichen Abständen abwechselnd (Nord/Süd) magnetisiert wird. Um den Permanentmagneten herum sind im Drehgebergehäuse kleine magnetische Metallplättchen in gleichen Abständen kreisförmig angeordnet. Bei einer Drehbewegung der Welle bewegt sich das Polrad mit und es kommt zu wechselseitigen magnetischen Effekten zwischen dem Polrad und den Metallplatten. Zwischen den wechselseitigen Magnetfeldern des Polrades und der Metallplättchen im Drehgebergehäuse wirken abstoßende (Nord/Nord bzw. Süd/Süd) und anziehende (Nord/Süd) Kräfte. Findet keine Drehbewegung der Welle statt, so bleibt die Welle in einer Position stehen, was mit einem Einrasten gleichkommt. Das Polradprinzip benötigt deutlich mehr Bauraum als andere Verfahren und ist aufwendiger und teurer in der Herstellung.
Drehhemmung (erhöhtes Betätigungsdrehmoment)
Drehimpulsgeber werden sehr häufig als Handeinsteller eingesetzt. Sie sind daher für eine manuelle Betätigung der Welle optimiert. Für eine sichere Sollwerteingabe ist ein höheres Betätigungsdrehmoment erforderlich. Nur so können exakte Sollwerte eingestellt und ein unbeabsichtigtes Verdrehen der Welle verhindert werden.
Das Drehmoment beschreibt die Drehwirkung einer Kraft, die auf die Welle wirken muss, um diese zu drehen. Die Einheit für das Drehmoment ist Newtonmeter [Nm]. Um das Drehmoment zu erhöhen, werden Drehimpulsgeber mit Gleitlagern eingesetzt und die Drehhemmung wird durch ein Dämpfungsfett und/oder ein Federelement zur Erzeugung zusätzlicher Reibung realisiert. Der Einsatz eines Kugellagers ist aufgrund des geringen (Losbrech-)Drehmoments nicht sinnvoll.
Die Angabe des Drehmomentes muss unter Berücksichtigung der Betriebstemperatur und der Anzahl der Wellenbewegungen erfolgen. Je niedriger die Betriebstemperatur ist, desto höher ist das Betätigungsmoment. Auch ein längerer Stillstand der Welle und die Betätigungsgeschwindigkeit (Udr./min) haben einen Einfluss. Häufig wird das Drehmoment in einem Datenblatt bei Raumtemperatur und einer Betätigungsgeschwindigkeit von konstant 10 Udr./min angegeben.
Aus technischen Gründen ist es nicht möglich, die Spezifikation durch einen einzelnen Wert darzustellen. Dies ist nur für einen Wertebereich möglich. Gründe hierfür sind vor allem die Toleranzen der Wellenlagerung und der Welle sowie die Menge und Lage des Dämpfungsfettes auf der Welle und der Wellenlagerung. Eine typische Angabe für ein Betätigungsdrehmoment in Datenblättern ist:
0,1 ≤ M ≤ 0,6 Ncm / 0,3 ≤ M ≤ 1,3 Ncm (@RT, 10 U/min)
Die Abkürzung RT steht für den Bezug der Drehmomentmessung auf die Raumtemperatur, die nach der Norm für Wohn- und Bürogebäude zwischen 19 °C und 21 °C liegt.
Knopfthematik

Neben den Eigenschaften wie Betätigungsdrehmoment oder Rastmoment spielt der Drehknopf eine entscheidende Rolle für die haptischen Eigenschaften eines Drehimpulsgebers. Masse und Außendurchmesser sind dabei die wichtigsten Faktoren.
Handräder haben in der Regel einen Drehknopf mit hoher Masse. Wird eine schnelle Drehbewegung ausgeführt und der Einstellknopf losgelassen, verhindert die relativ hohe Masse des Einstellknopfes einen abrupten Stillstand der Drehgeberwelle. Das heißt: Die erhöhte Masse des Einstellknopfes führt zu einer kurzzeitigen Weiterdrehung der Welle (Nachlaufeigenschaft durch Massenträgheit). Dies kann bei schnellen Sollwertänderungen von Vorteil sein, da dieser Effekt die Drehbewegung unterstützt.
Bei MEGATRON-Drehimpulsgebern in Handradausführung ist im Drehknopf zusätzlich eine Handkurbel integriert. Bei Handrädern gehört der Drehknopf zum Lieferumfang und ist bereits am Drehimpulsgeber befestigt. Für alle anderen Drehimpulsgeber muss ein Drehknopf als zusätzliches Zubehör ausgewählt werden.








Drehimpulsgeber sind optische Inkrementalgeber und liefern ihre Ausgangswerte in Form von Impulsen. Sie werden häufig als Mensch-Maschine-Schnittstelle zur genauen Vorgabe von Sollwerten eingesetzt. Für den praktischen Einsatz sind die Bedienelemente oft zusätzlich mit Rast- und Tastfunktionen ausgestattet. Da sie manuell bedient werden, hat die Produktgestaltung einen großen Einfluss auf das Bediengefühl.
Dazu zählen unter anderen eine auf die Bedürfnisse der Applikation abgestimmte Drehhemmung, Tastfunktion und Rastungen. Die Drehhemmung verhindert z.B. ein unbeabsichtigtes Verstellen und bestimmt in Kombination mit Rastungen die haptischen Eigenschaften. Mit unserem Portfolio decken wir eine Vielzahl von Anforderungen ab. Darüber hinaus sind wir Ihr Partner für die Optimierung des Drehimpulsgebers in Ihrer Applikation.
Denn die Anforderungen der Anwendung bestimmen die Betätigungsart. Wir beraten Sie gerne und definieren gemeinsam mit Ihnen das optimale Produkt für Ihr „Design in“. Unser Anspruch ist es, das funktional und wirtschaftlich beste Produkt für Ihre Anwendung zu liefern. Dabei begleiten wir Sie als langfristiger Partner mit hoher Liefertreue und gesicherter Produktqualität über den gesamten Lebenszyklus Ihrer Applikation.