 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Encoders incrementales
Encoders ópticos y magnéticos con salida incremental
Guía encoder incremental
Contenido
¿Qué es un encoder incremental?
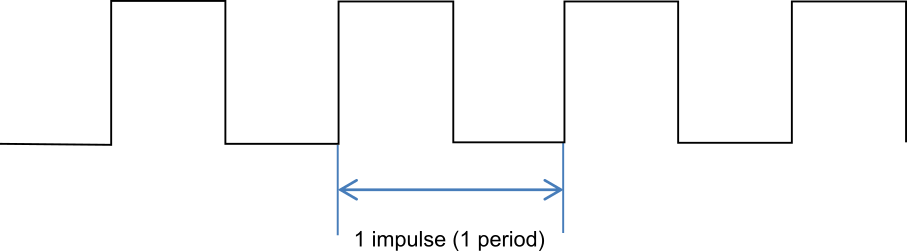
Los encoders incrementales son codificadores rotativos que proporcionan su señal de salida en forma de pulsos. Un pulso corresponde a un periodo, el incremento, que da nombre a este tipo de encoder. Los codificadores incrementales también se denominan codificadores de impulsos rotativos debido a sus características como codificadores para movimientos rotativos y a su forma de señal. El uso de pulsos para la medición es un principio fundamentalmente diferente al de los potenciómetros y los codificadores absolutos, por ejemplo. La propiedad más importante para determinar la precisión angular de un codificador incremental es el número de impulsos generados por cada revolución completa del eje en la salida (impulsos por revolución, ppr). Este valor se puede encontrar en todas las hojas de datos de un codificador incremental.

Para evaluar las señales de los encoders incrementales, se requiere siempre una unidad de evaluación externa, como un contador.
- Si se va a registrar el ángulo, hay que evaluar la información de los incrementos. Si, por ejemplo, el codificador incremental suministra 360 impulsos, entonces 1° corresponde exactamente a un impulso.
- Para medir la velocidad angular (cambio de ángulo por unidad de tiempo), se calcula el número de impulsos por unidad de tiempo.
En general, hay que tener en cuenta algunas cosas a la hora de evaluar las señales, véase Evaluación de señales incrementales.
Principios de funcionamiento
Hay varios principios tecnológicos que se utilizan para realizar técnicamente un encoder incremental. La tecnología más extendida es probablemente la detección optoelectrónica, que se utiliza en los encoders ópticos. Los principios de medición magnética son otra posibilidad. También se ofrecen "encoders Hall" con salidas incrementales. En este caso, MEGATRON confía exclusivamente en los modernos sensores Hall basados en el gradiente.
Encoder incremental óptico
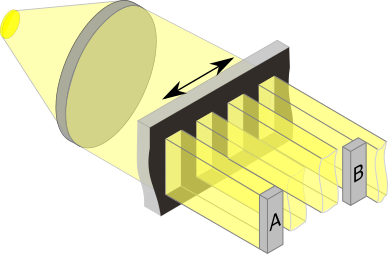
La ilustración muestra el principio de medición de imágenes de un codificador óptico de forma muy simplificada. Los dos detectores A y B se desplazan espacialmente durante la rotación de la rueda del codificador (negro), generando pulsos.
La tecnología de sensores ópticos tiene varias ventajas que hacen de los encoders ópticos los encoders incrementales más importantes. En primer lugar, el hecho de que el propio método de medición de los elementos sensores integrados ya genera incrementos y, por tanto, su uso en codificadores incrementales es obvio. La visión general de los codificadores ópticos se puede encontrar aquí.
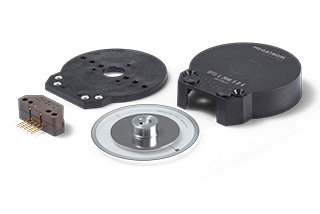
El sistema óptico de un encoder incremental óptico moderno consta, como mínimo, de los siguientes componentes:
- Un diodo emisor de luz (LED), que genera luz
- Un colimador, que alinea la luz del LED en paralelo.
- Una rueda codificadora, que tiene zonas alternas transmisivas y no transmisivas (o reflectantes y absorbentes).
- El fotodetector, que detecta la luz incidente del LED y la convierte en una señal eléctrica.
Dos procesos se han establecido en el mercado: El método transmisivo (imagen) y el reflexivo (interferencial). Con el método transmisivo, se ilumina la rueda del codificador, mientras que con el método reflexivo, el haz de luz se refleja en la superficie de la rueda del codificador y se utilizan efectos de interferencia.
Breve explicación del proceso de transmisión:
La luz es colimada (paralelizada) y pasa por la rueda de codificación. La rueda garantiza que las zonas brillantes y oscuras se encuentren alternativamente con los detectores de forma periódica. La señal de ambos fotodetectores suele estar desfasada 90°. Esto significa que el sentido de giro puede determinarse mediante la secuencia de las señales o sus intervalos en la señal de salida. El diseño varía en función de las necesidades. Otros elementos de la estructura del sensor generan, por ejemplo, un impulso de referencia que genera una señal en un tercer canal sólo una vez por revolución. Con esta referencia, se puede calcular el ángulo absoluto. Es decir, el número de impulsos se cuenta a partir de la referencia. Si el valor del contador se pierde debido a una interrupción de la alimentación, la información sobre el ángulo absoluto puede restablecerse mediante un recorrido de referencia.
Ruedas de codificación para codificadores ópticos
Las ruedas de codificación están hechas de diferentes materiales, normalmente metal, vidrio o plástico. El plástico se utiliza principalmente para los codificadores de bajo coste. Las ruedas codificadoras de metal son muy robustas. Si se compara el metal con el vidrio o el plástico, no es posible alcanzar resoluciones ópticas tan altas en el método transmisivo con un diámetro idéntico de metal. Con el método reflexivo, la estructura incremental se imprime en la rueda de codificación y es posible realizar estructuras más finas.
Encoder incremental de efecto Hall
Los codificadores de efecto Hall también están disponibles con salidas incrementales. Al igual que los codificadores ópticos, la tecnología de medición es sin contacto y, por tanto, apenas se ve afectada por el desgaste (aparte del rodamiento). Las ventajas de los codificadores incrementales de efecto Hall residen principalmente en la vida útil prácticamente ilimitada de la tecnología de sensores (no hay envejecimiento de los diodos LED) y en la excelente resistencia a los golpes. Una desventaja puede ser la sensibilidad a los campos de interferencia externos y el hecho de que las señales se transmiten con un ligero retraso de tiempo (tasa de actualización). Para una explicación del principio de medición de los codificadores de efecto Hall, véase, por tanto, la guía del encoder absoluto. Para un análisis más detallado de las ventajas e inconvenientes de las distintas tecnologías de codificación, consulte la guía de encoders.
Evaluación de señales incrementales
Canales, resolución y sentido de giro
Los codificadores incrementales suelen tener varias salidas de señal. Si un codificador incremental emite varios paquetes de señales, el término canal se utiliza en este contexto. Por ejemplo, "canal A" y "canal B". En la literatura también se utiliza el término "pista" en lugar de "canal".
Ejemplo: Si en la hoja de datos de un encoderr incremental se indica el valor 360 imp./dr. y el codificador tiene las señales de salida eléctrica "A" y "B" ("canal A" y "canal B"), entonces en la salida "A" se emiten 360 impulsos por una revolución del eje (por 360°) y de igual manera en la salida "B" se emiten otros 360 imp./dr. 90° por delante o por detrás de los impulsos del canal A. En total, el codificador genera 720 impulsos por rotación completa del eje (360°) para los dos canales A y B.
El término resolución también se utiliza para el número de impulsos por revolución (ppr.). Cuanto mayor sea este valor (ppr), mayor será la resolución angular del codificador.
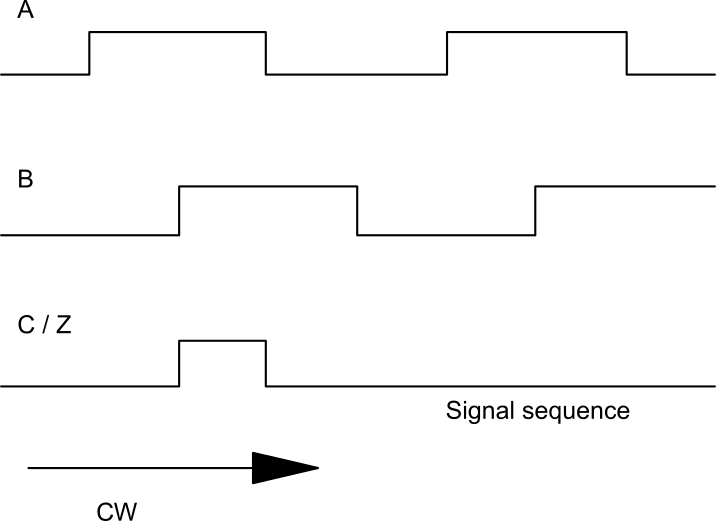
Las señales de onda cuadrada del "Canal B" van delante o detrás de las señales del "Canal A" en 90°. El hecho de que la señal vaya por delante o por detrás de las señales del "Canal A" del "Canal B" en 90° depende del producto y se especifica en la hoja de datos. Por lo general, hay una ilustración de la función de salida de la señal en relación con la indicación del sentido de giro, en la que se muestra la secuencia de señales de los canales.
Ejemplo: En la ilustración de al lado, CW (CW=ClockWise) se define como la dirección de rotación. Si el codificador se ve de frente (el extremo del eje del codificador angular está orientado hacia el observador) y el eje del codificador gira en el sentido de las agujas del reloj, la salida de la señal del "canal B" está 90° por detrás de la salida de la señal del "canal A". Sin embargo, si el eje gira en sentido contrario a las agujas del reloj, la señal del "canal B" se adelanta 90° a la del "canal A".
Esta relación puede utilizarse en una unidad de evaluación para detectar el sentido de giro. El número de impulsos, la longitud de los mismos y la duración del periodo de la vía A y de la vía B son idénticos. Cuando se sustituye un codificador por otro modelo, estas propiedades son decisivas, ya que no es necesario cambiar la programación de la unidad de evaluación si las secuencias de señales de los productos a sustituir son idénticas.
Vía Z / Señal de índice
A menudo, se puede seleccionar otra pista como opción, la llamada pista índice o "pista Z". A la salida de la vía Z, se emite una señal de índice en forma de un solo impulso rectangular para cada rotación completa del eje (360°).
La señal del índice tiene esencialmente dos funciones:
- Como referencia del punto cero: Después de una liberación de tensión, se puede aproximar a un punto cero definido con la ayuda del pulso índice.
- Como pulso dereferencia: Especialmente con codificadores rotativos que se operan a velocidades de actuación muy altas, el pulso de referencia tiene una función de comprobación como pulso de conteo separado para una actuación/revolución completa.
Caso práctico: Se comprueba si entre dos impulsos de índice sucesivos el número de impulsos contados "normales" corresponde a los esperables. Si, por ejemplo, se utiliza un codificador angular con la especificación 16000 impulsos / revolución y la unidad de evaluación cuenta menos de 16000 impulsos por revolución completa, se produce un error.
Evaluación de flancos / señal de cuadratura
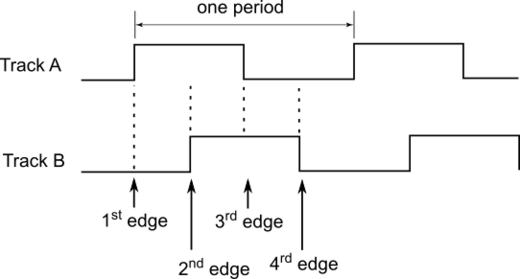
El desfase de 90° de las señales de onda cuadrada de los canales A y B tiene una ventaja. Una señal de onda cuadrada tiene un flanco de subida y otro de bajada por pista y período de señal. La secuencia de bordes para las vías A y B de un período de señal son las siguientes:
Flanco ascendente de la pista A (1) → después de un ¼ de período Flanco ascendente de la pista B (2) → después de un ½ período Flanco descendente de la pista A (3) → después de un ¾ de período Flanco descendente de la pista B (4).
Si en una unidad de evaluación no sólo se evalúa el flanco ascendente de una vía, sino los flancos ascendentes y descendentes de ambas vías A y B, el número de impulsos puede cuadruplicarse con este método. Esto corresponde a un aumento de la precisión por un factor de cuatro sin cambiar nada estructuralmente en el encoder.
Ejemplo: Si la hoja de datos del codificador incremental especifica una resolución de 1024 imp./dr., entonces sería cuatro veces mayor para una evaluación de flancos, lo que corresponde a 4096 señales por revolución por canal. La evaluación de flancos que acabamos de describir también se denomina "señal de cuadratura con información de dirección". Se puede realizar una evaluación de flancos, por ejemplo, sobre la base del circuito integrado LS7083 ofrecido por MEGATRON.
Velocidad máxima y frecuencia de corte
Los encoders incrementales no pueden funcionar a velocidades arbitrarias. Existen limitaciones mecánicas y/o electrónicas:
Las limitaciones mecánicas se pueden determinar a partir de la hoja de datos y tienen las siguientes causas:
- Max. Velocidad del rodamiento del eje (sólo se aplica a los codificadores con su propio rodamiento del eje, véase Encoder de eje). En este caso, la velocidad de accionamiento máxima permitida suele ser inferior a 10000 rpm.
- La excentricidad (desequilibrio) de la mecánica. En el caso de los encoders ópticos, esto se debe sobre todo al desequilibrio de la rueda del codificador. Sin embargo, la velocidad máxima de accionamiento puede ser de hasta 60.000 rpm. Sin embargo, con los encoders kit magnéticos, esta limitación no suele existir.
Se puede calcular la limitación electrónica. El resultado del cálculo es la "velocidad de accionamiento teóricamente máxima posible".
- El motivo es la frecuencia de corte de la electrónica. Una frecuencia superior a la frecuencia límite no puede ser procesada por la electrónica. Cuanto mayor sea la frecuencia de corte y menor la resolución del codificador, mayor será la velocidad de accionamiento teóricamente posible. La siguiente fórmula permite calcular la velocidad máxima teórica de actuación a partir de la frecuencia de corte:
\N - (máx. rpm =\Nfrac{\\Ntexto {frecuencia de corte} \frac {1} {s} * 60 }{{ número de pulsos}})
A continuación se presentan dos ejemplos para calcular la velocidad máxima de actuación teórica.
Ejemplo 1: Se desea una resolución de 512 imp./rev. La frecuencia límite del codificador se especifica como 100 kHz. Se obtiene
({100000 \cdot 1/s\cdot 60 \text{ s} \over 512} = 11718 \text{ rpm} \cdot)
Resultado: La velocidad de accionamiento máxima teórica permitida es de 11718 rpm.
Ejemplo 2: Se desea una resolución de 10000 imp./rev. La frecuencia límite del codificador se especifica como 100 kHz. Resultado: La velocidad de accionamiento máxima teórica es de 600 rpm.
({100000 \cdot 1/s \cdot 60 \text{ s} \cdot 10000} = 600 \text{ rpm} \cdot)
Una comparación entre la velocidad de accionamiento máxima teórica y la mecánicamente admisible muestra cuál es la que cuenta para la aplicación: El menor de los dos valores es relevante.
Tolerancias y desviaciones de los encoders incrementales ópticos
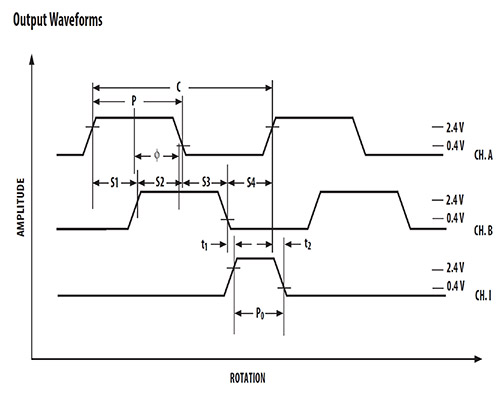
Ningún encoder incremental proporciona señales perfectas. En el caso de los codificadores incrementales ópticos, a continuación se describen las incertidumbres o tolerancias que deben observarse en las señales de estos codificadores. El sistema óptico incluye la propia rueda codificadora, así como el módulo codificador o el conjunto que contiene el LED y el fotodetector. Todos los elementos en interacción producen una cierta desviación de la forma ideal, rectangular, de la señal y de la posición ideal de los bordes. Estas relaciones de tolerancia se describen en la ficha técnica de un codificador incremental óptico y ayudan al usuario a realizar un análisis más preciso de los datos de medición. En la mayoría de los casos, se muestran las señales de los canales A, B y, en su caso, Z. Con la ayuda de la ilustración adyacente, se explican las relaciones con la ayuda de ejemplos.
Los símbolos tienen el siguiente significado:
C corresponde a un periodo de señal P representa un ½ periodo de señal S para ¼ periodo de señal Ф es la referencia de fase entre los canales A y B.
Por tanto, lo ideal es que C = 2 * P = 4 * S = S1 + S2 + S3 + S4.
Ejemplo para describir el campo de tolerancia de un cuarto de período Un incremento y, por tanto, un período, consta idealmente de cuatro partes de señal equidistantes (C/4). Como en la práctica un periodo de señal no se divide en cuatro partes iguales, se describe la posible relación y, por tanto, la banda de tolerancia de las cuatro partes de un periodo de señal (T) entre sí. El siguiente término describe que una cuarta parte del periodo de la señal puede variar una duodécima parte del periodo de la señal:
(S1,S2,S3,S4 = \frac {C} {4} \pm \frac {C} {12}\)
Ejemplo de descripción del campo de tolerancia de una duración de medio ciclo
Un incremento y, por lo tanto, un periodo de señal constan idealmente de dos componentes de señal equidistantes (C/2). Dado que un periodo de señal no siempre está formado exactamente por dos pares de ondas de igual longitud, se describe la posible relación de ambos pares de ondas de un periodo de señal (T) entre sí. El siguiente término describe que la mitad de un período, respectivamente la mitad de un período de señal, respectivamente la mitad de una longitud de onda puede variar en más o menos una doceava parte del ideal.
(P = \frac {C} {2} \pm \frac {C} {12}\)
Descripción del posible desfase entre los canales A y B Lo ideal es que el desfase entre los canales A y B sea exactamente de 90° (noventa grados). Los 90° se representan en la relación C/4. Así, un cuarto de período de la señal corresponde a 90°. El error en este caso puede ser de ± C/24, es decir, más menos una veinticuatroava parte. Una veinticuatroava parte corresponde a 360°/24, lo que corresponde a un posible error de fase de más-menos 15°. Así, la relación de los incrementos entre los canales A y B puede estar en un rango de 90° ±15° y la relación de fase entre los canales A y B puede estar en un rango entre 75°...105°.
(Ф = \frac {C} {4} \pm \frac {C} {24}\)
Descripción de la banda de tolerancia de la longitud de pulso del pulso de índice (canal Z ) El pulso de índice se emite una vez cada 360° cuando el eje es operado continuamente en una dirección. La duración de un periodo corresponde a C. La representación C/4 significa que el pulso índice corresponde idealmente a ¼ de la duración de un periodo de la señal. La anchura del pulso del índice puede desviarse del ideal, es decir, de la longitud de un cuarto de período de la señal (=C/4), en más o menos una doceava parte de un período de la señal.
Esto significa que la anchura del pulso del índice puede variar entre 1/3 (=C/3) y 1/6 (=C/6) de un periodo de la señal.
(Po = \frac {C} {4} \pm \frac {C} {12}\)
Interpolación seno-coseno
Cuantos más impulsos por revolución se realicen en un codificador óptico, menor será el ancho de línea de los incrementos en la rueda de codificación. Sin embargo, el sistema óptico de un codificador angular sólo es capaz de detectar incrementos hasta una determinada anchura de línea. Por ejemplo, 10000 líneas no pueden aplicarse a una rueda de codificación con un diámetro de 10 mm debido a su pequeño tamaño. Si hay que realizar codificadores incrementales con un diámetro de carcasa pequeño y una alta resolución, esto se hace a menudo sobre la base de la interpolación seno/coseno.
En este método, el sistema óptico del codificador no se utiliza como en un codificador incremental óptico convencional, por lo que hay cambios bruscos de estado entre la transmisión y una interrupción de la transmisión, respectivamente la reflexión, la interrupción de la reflexión. En cambio, la transición entre la ausencia de transmisión o reflexión y la máxima se realiza de la forma más fluida posible. La transición suave conduce a una función sinusoidal de la señal. Para realizar un segundo canal, que genera una señal de coseno, se necesita otro LED y un fototransistor. A continuación, se digitalizan las señales de seno y coseno. Por regla general, aquí se utiliza una frecuencia de muestreo continua.
Ejemplo: Si se utiliza una rueda de codificación de la que se obtienen 8 períodos sinusoidales, esto corresponde a una resolución de 3 bits. Sin embargo, si esta señal sinusoidal se muestrea con 10 bits, se obtiene una resolución (de digitalización) de 213 bits, que corresponde a una resolución de 8192 imp./rev. La ventaja del principio es, por tanto, evidente.
También hay codificadores ópticos y magnéticos con salida analógica, que proporcionan señales analógicas sinusoidales y cosinusoidales. Con la ayuda de este codificador, es posible la interpolación descendiente.
Interfaces de salida
Debido a sus características (alto-bajo, encendido-apagado, lógica booleana), las señales incrementales son especialmente adecuadas para trabajar junto con los circuitos digitales. Por ello, muchas series de codificadores incrementales ofrecen interfaces que facilitan la integración en estas redes de circuitos:
- OC (Colector abierto)
- Salida de tensión estándar o TTL (lógica de transistores)
- PP (Push Pull)
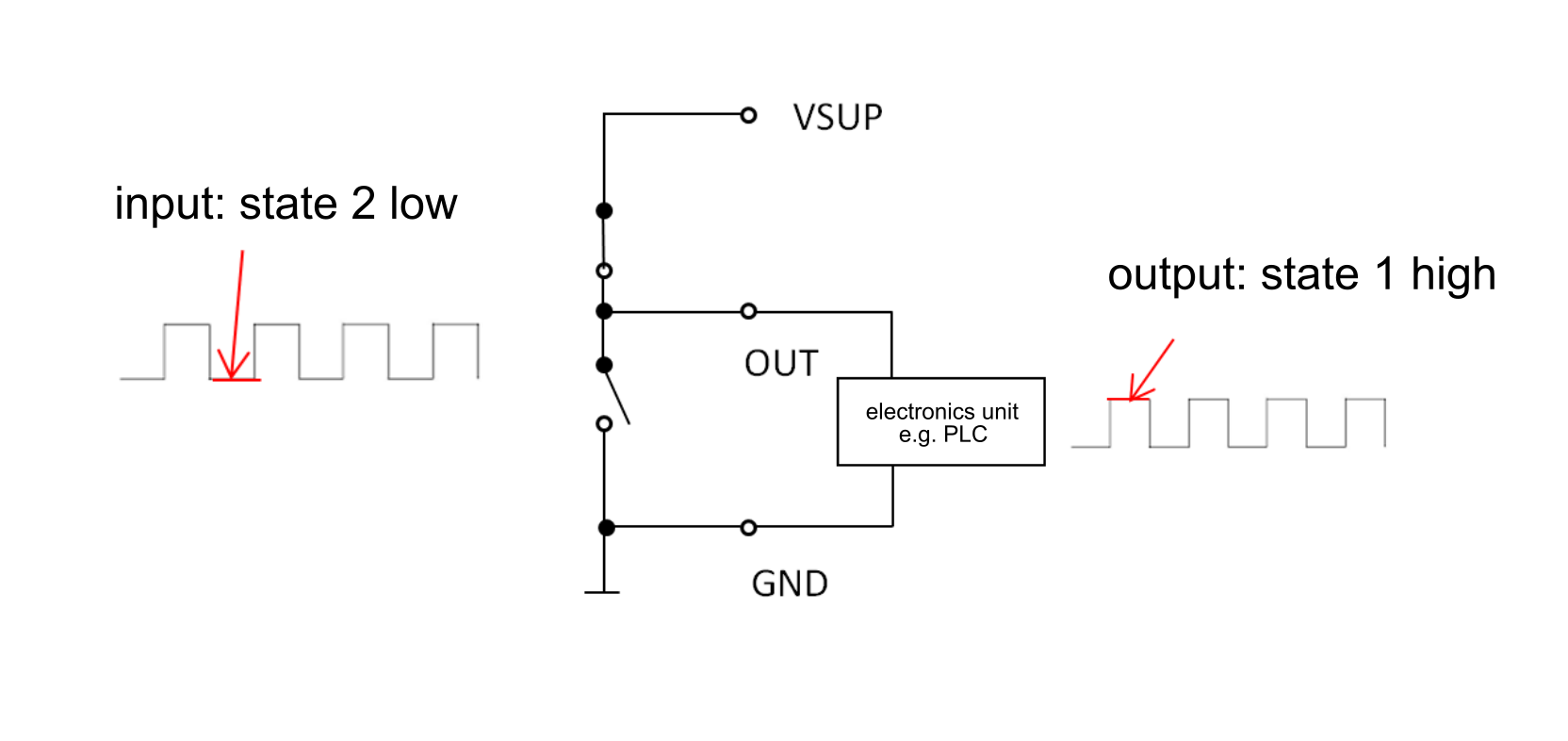
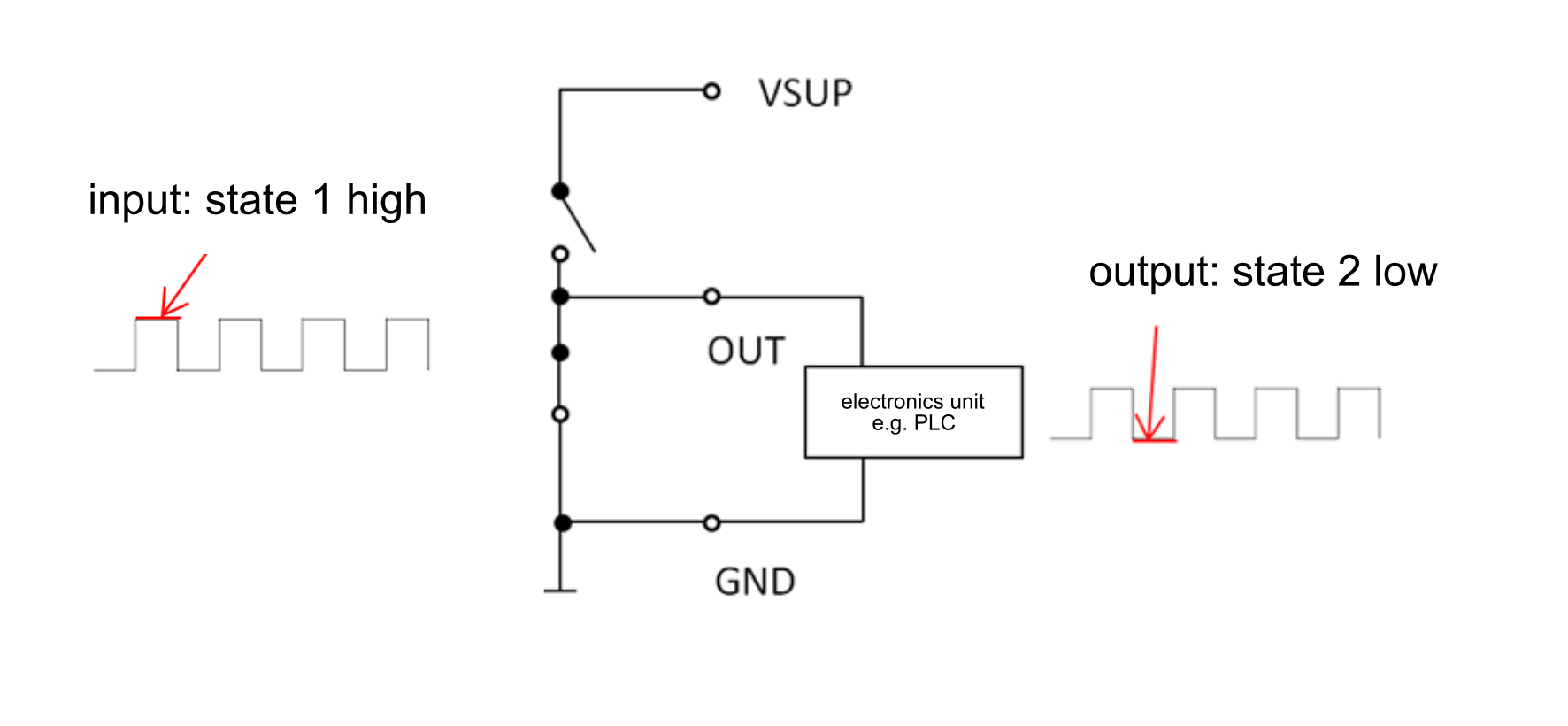
Salida de colector abierto (OC)
El circuito de colector abierto es un estándar obvio para los circuitos de salida de las señales incrementales. Como ventaja principal, permite conectar la salida a un nivel de tensión diferente definido por la aplicación. Esto es posible porque el codificador no lleva integrada ninguna resistencia de pull-up y el colector sale de la carcasa sin necesidad de más cableado (colector abierto). El transistor funciona así como un interruptor.
El siguiente ejemplo es aplicable a un transistor bipolar Si-NPN:
Nivel alto en la salida de la señal:
- A bajo nivel (<0,7 V) en la base del transistor, éste se bloquea y la tensión de alimentación (VSUP) se aplica al colector.
Nivel bajo en la salida de la señal:
- Con un nivel alto (>0,7 V) en la base del transistor, la tensión en el colector (VSUP) se lleva a tierra.
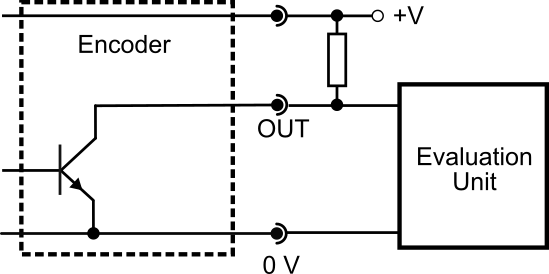
Con el circuito de colector abierto, suele ser necesario colocar una resistencia pull-up entre la tensión de alimentación y las salidas de señal A, B y Z del codificador rotativo (colector). Esto asegura que los niveles pueden ser detectados por la unidad de evaluación como niveles bajos y altos. Un valor típico para una resistencia de pull-up puede ser de 4,7 kOhm. La tensión de colector máxima depende del transistor utilizado y suele estar especificada en la ficha técnica del encoder. Como en algunos casos es superior a 50 V, las señales incrementales con un nivel de señal muy alto pueden transmitirse a través de largas distancias de cable. Debido a la variabilidad del nivel de la tensión del colector, también es posible la conversión de nivel.
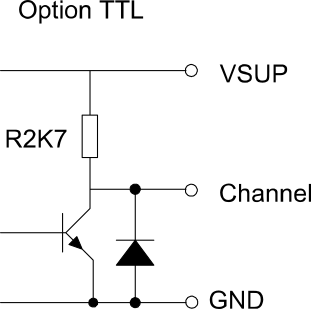
Salida TTL
La salida TTL se suele denominar simplemente salida de tensión. La diferencia con la salida de colector abierto es que las resistencias de pull-up necesarias ya están integradas en la carcasa del encoder y, por tanto, los niveles son fijos. Por lo tanto, no es posible una conversión de nivel variable como en el circuito de colector abierto.
Estos niveles para la lógica TTL estándar son: < 0,4 V para el nivel bajo > 2,4 V para el nivel alto
Salida Push / Pull
El circuito de salida push / pull se basa en un par de transistores complementarios (canal n y canal p). Bloquea alternativamente uno de los dos transistores.
Durante el nivel alto de la señal de salida, ésta se encuentra al nivel de VSUP y en el estado bajo, está aproximadamente a tierra. La ventaja de un circuito push / pull es que no se necesitan resistencias pull-up o pull-down adicionales. Si no se requiere una conversión de nivel, los codificadores con circuitos de salida push / pull pueden utilizarse como reemplazo universal de las salidas de colector abierto y TTL / tensión.
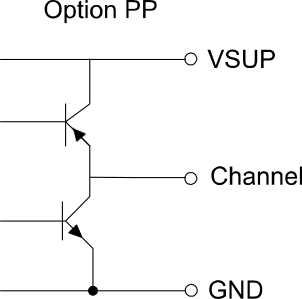
Nivel bajo en las entradas del transistor: NPN bloquea y PNP abre El nivel alto es VSUP
Nivel alto en las entradas del transistor: NPN abre y PNP bloquea el nivel bajo aproximadamente a tierra





















Los encoders incrementales se utilizan cuando hay que medir ángulos, velocidades o velocidades angulares con gran precisión. Los codificadores incrementales proporcionan señales de salida en forma de impulsos que son contados por una unidad de evaluación externa. La propia tecnología de sensores de los productos de alta calidad utilizados por MEGATRON se basa en principios de medición sin contacto, como la tecnología de sensores optoelectrónicos y magnéticos (efecto Hall).
Básicamente, se puede afirmar que los codificadores incrementales ópticos son insensibles a los campos de interferencia externos y ofrecen la máxima precisión en los procesos de posicionamiento o ajuste. Los codificadores magnéticos son extremadamente duraderos y muy resistentes a las vibraciones. Gracias a la gran variedad de diseños y opciones de salida que ofrecemos, hay un codificador incremental en nuestra cartera que se adapta a casi cualquier aplicación.
Sin embargo, las aplicaciones especiales suelen requerir una adaptación técnica, que en MEGATRON ya podemos realizar para cantidades relativamente pequeñas. Nuestro objetivo es ofrecer a cada cliente el mejor producto para la aplicación, tanto funcional como económicamente. Le apoyamos como socio de confianza con un alto nivel de fiabilidad de entrega y garantía de calidad, desde la consulta inicial hasta la producción en serie y hasta el final del ciclo de vida del producto.