 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Encoder absoluto
Encoders magnéticos para la medición de ángulos absolutos
Guía Encoder absoluto
Contenido
¿Qué es un encoder absoluto?
Los encoders absolutos son codificadores rotativos que miden ángulos, convierten esta información en señales eléctricas y las emiten como valores absolutos. El uso de la electrónica para procesar el valor medido los diferencia de los potenciómetros, que también proporcionan valores absolutos pero son componentes pasivos sin electrónica integrada. En el caso de los encoders absolutos, existe un punto cero fijo como punto de referencia para la medición del ángulo, al que se refiere el valor de salida en todo momento. El principio de un codificador absoluto es fundamentalmente diferente al de los codificadores incrementales, por ejemplo, en los que sólo se transmiten cambios angulares (valores relativos) desde el codificador. Los codificadores absolutos se dividen en dos categorías en función del rango angular a detectar. Los codificadores absolutos que miden ángulos a lo largo de varias revoluciones se denominan codificadores multivuelta y los codificadores absolutos que miden ángulos de hasta 360° se denominan codificadores monovuelta.
Programación de señales de los encoders absolutos
Los encoders absolutos ofrecen numerosas posibilidades para mostrar los valores angulares medidos en forma de una función eléctrica "señal de salida". La electrónica de muchos codificadores es programable y permite personalizar las curvas de salida. El siguiente ejemplo muestra la programación estándar de fábrica de un encoder absoluto analógico: El encoder está programado en el sentido de giro CW con una señal de salida de 0...10 V (cuando el eje gira en el sentido de las agujas del reloj) y detecta un ángulo de 0...360°. Cuando está a 0°, emite 0 V. Si el eje gira 90° en el sentido de las agujas del reloj, proporciona un valor de 90°/360° * 10 V = 2,5 V. Mientras el eje del codificador no se mueva, este valor permanece constante. La ilustración del ejemplo 1 muestra la curva de señal de un codificador absoluto de este tipo.
| Ángulo medido [° grados] | Tensión de salida [voltios] |
| 0° = 0 V | 0 V |
| 360° = 10 V | 10 V |
| 45° = 1,25 V | 1,25 V |
| 90° = 2,5 V | 2,5 V |
| 180° = 5,0 V | 5 V |
Para tener una referencia de todo el rango de salida de la señal, el término "escala completa" se utiliza a menudo con la abreviatura "F.S.". En el ejemplo anterior, por ejemplo, F.S. = 10 V. Ahora, sin conocer la tensión máxima, la programación también se puede acordar mediante valores porcentuales. Por ejemplo, 0° corresponde al 0% de F.S. (0% del valor máximo, es decir, 0 V) y 360° al 100% de F.S. (100% del valor máximo, es decir, 10 V). De este modo, la función de salida de una señal puede describirse con precisión sin necesidad de utilizar una representación gráfica:
0° = 0% F.S. 90° = 100% F.S. 180° = 100% F.S. 270° = 0% F.S. 360° = 0% F.S.
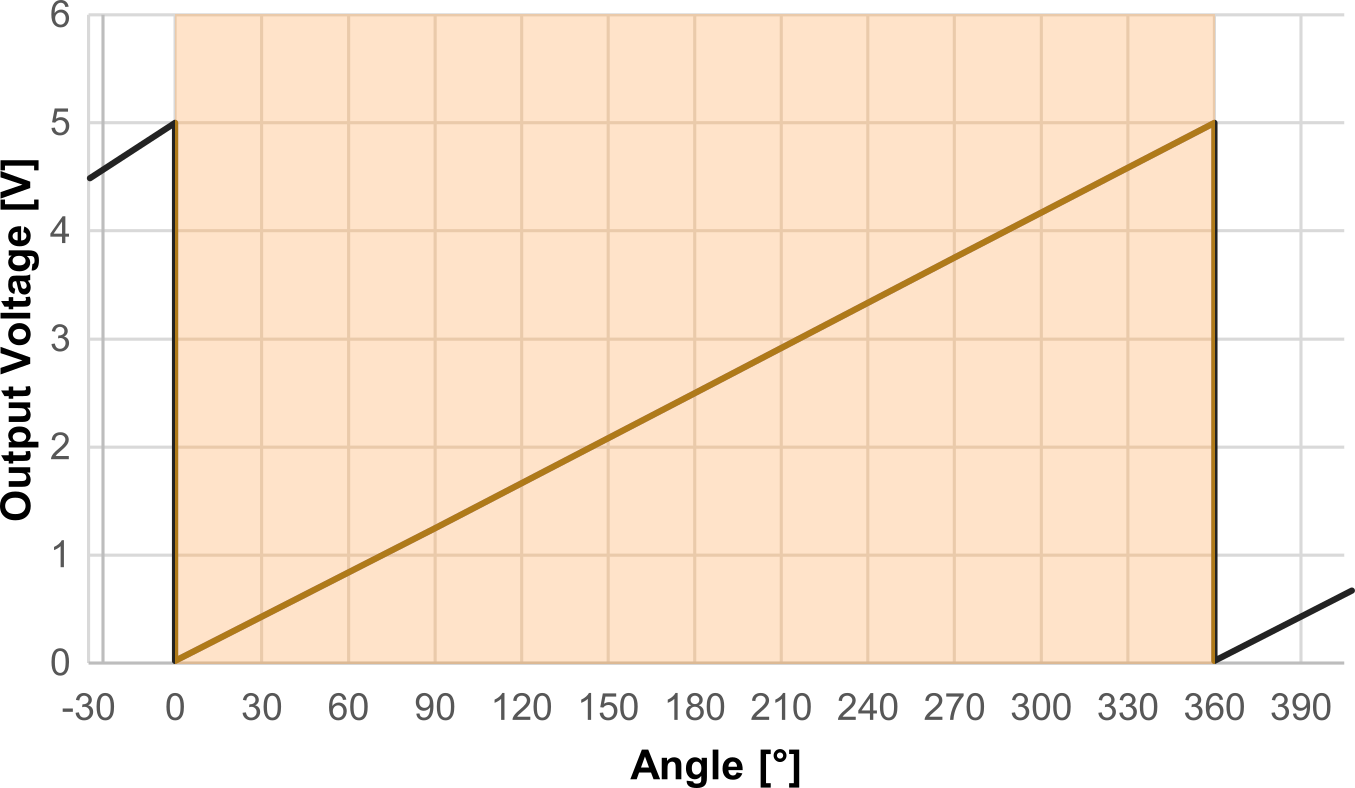
Ejemplo 1
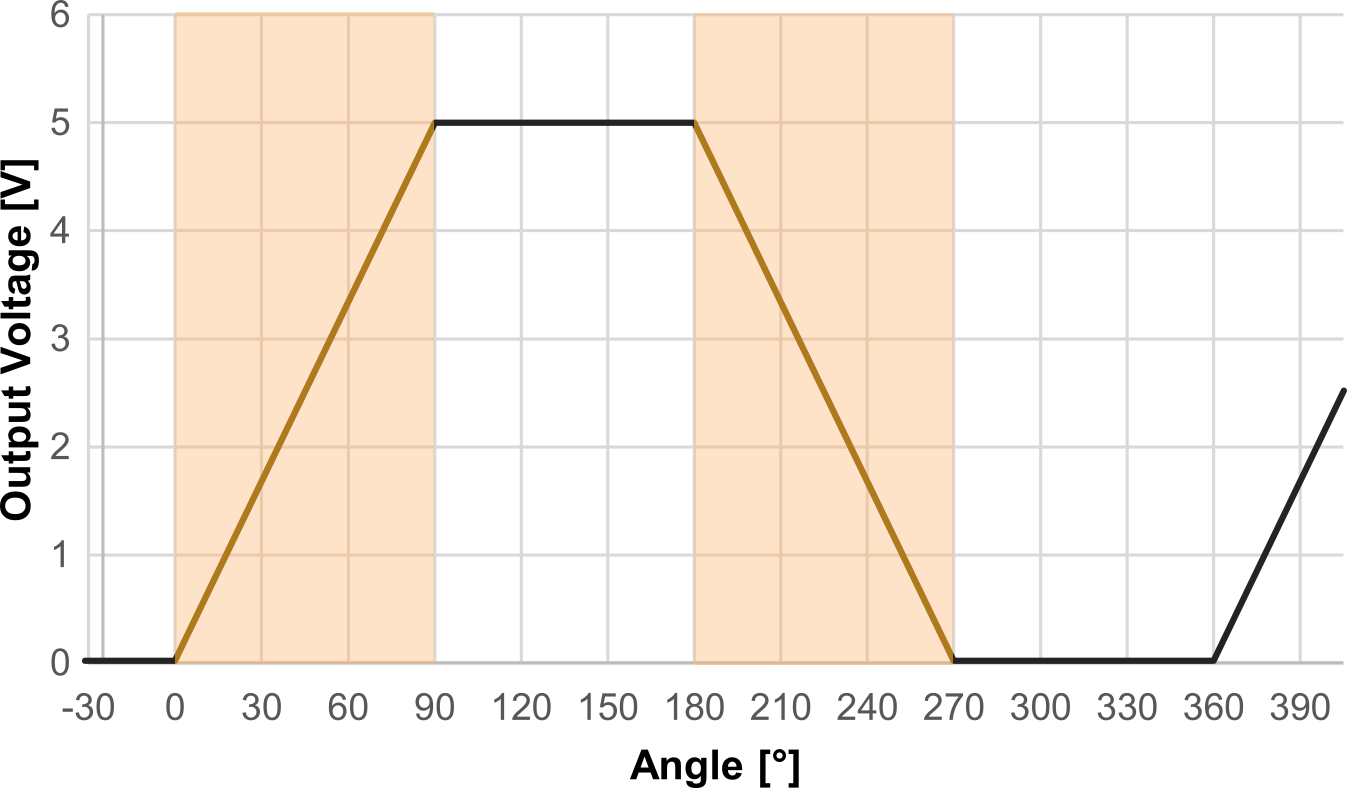
Ejemplo 2
La figura muestra la curva de señal para estos requisitos en el ejemplo 2. Las señales de salida de los codificadores absolutos también pueden emitirse mediante otras interfaces, por ejemplo, como corriente de salida o mediante modulación de anchura de impulsos (PWM).
Encoder rotativo de efecto Hall
El efecto Hall es un fenómeno en el que se genera una tensión eléctrica en un conductor portador de corriente (elemento Hall) cuando se encuentra en un campo magnético externo. El efecto se muestra en la imagen de al lado y puede explicarse como sigue: Cuando la corriente fluye a través de un conductor eléctrico, los portadores de carga se mueven a través del conductor. Si se aplica un campo magnético adicional al conductor, por ejemplo mediante un imán externo, los portadores de carga se desvían perpendicularmente a la dirección de la corriente. La razón es la fuerza de Lorentz: desvía los portadores de carga cuando se mueven y cuando actúa un campo magnético externo. Los electrones se acumulan ahora en los bordes del conductor. La separación de cargas crea una tensión adicional perpendicular a la dirección de la corriente, la llamada tensión Hall.
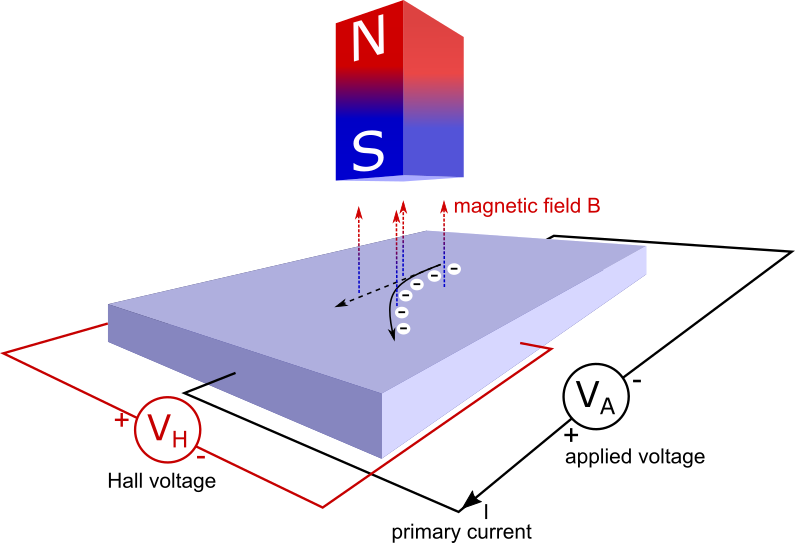
Un campo magnético genera una tensión Hall en un conductor conductor de corriente
Si el campo magnético externo cambia ahora debido al movimiento del imán, la tensión Hall también cambia - así es como se pueden realizar sensores con relativa facilidad. Si, por ejemplo, se coloca un imán permanente circular diametralmente magnetizado (polo norte/polo sur) sobre un elemento Hall y se somete a este imán a un movimiento de rotación, se puede medir una curva de tensión de salida sinusoidal. Si la posición del imán no cambia, el valor medido también permanece constante. Sin embargo, un sensor Hall sólo puede funcionar si también fluye una corriente, porque de lo contrario la fuerza de Lorentz no es efectiva. Por lo tanto, los sensores Hall necesitan corriente durante su funcionamiento, incluso si no hay cambios en la posición de medición.
Sensores Hall basados en el gradiente
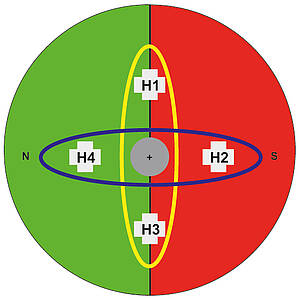
En principio, los campos magnéticos externos pueden interferir con la tecnología Hall, a menos que se tomen precauciones contra ellos. Hoy en día, se utilizan los llamados sensores Hall basados en el gradiente que son en gran medida insensibles a estas interferencias. El principio de esta variante particular es que dos o más sensores Hall se colocan muy cerca el uno del otro. El imán de medición, que está muy cerca de estos dos sensores, produce una diferencia en la señal de los dos sensores porque la curvatura del campo es relativamente fuerte. Sin embargo, un campo de interferencia externo, que suele tener una baja curvatura, es "visto" por ambos sensores de la misma manera. Si ahora sólo se evalúa la diferencia de los dos sensores (el gradiente), prácticamente sólo se percibe el imán de medición y, por tanto, el sistema de medición es muy robusto frente a los campos de interferencia externos.
Resolución
La mayoría de los encoders Hall son codificadores digitales y procesan señales de medición con una determinada resolución. La información se procesa con una precisión que corresponde al número de bits. Cuanto más alto sea este valor, más finas serán las señales que se pueden procesar. Por lo tanto, las curvas de salida analógicas de los dispositivos digitales siempre tienen una fina gradación, cuyo nivel viene determinado por la resolución. Las resoluciones típicas son de 10 bits, 12 bits o 14 bits, según el modelo de codificador. Por ejemplo, la resolución angular es de 0,088° con 12 bits y de 0,022° con 14 bits. Para determinar estos valores, ayuda la siguiente observación sencilla:
- La resolución se utiliza para calcular el número de cambios de estado que se pueden representar: 1 bit corresponde a 2 cambios de estado (ya que 21 = 2), 12 bits corresponden a 4096 cambios de estado (ya que 212 = 4096).
- El número de cambios de estado se divide en todo el rango del ángulo eléctrico de rotación.
Para calcular la resolución angular, hay que dividir el ángulo de rotación eléctricamente efectivo por el número de estados posibles:
(\text {resolución del ángulo en grados} =\frac {360°} {2^\text {número de bits}).
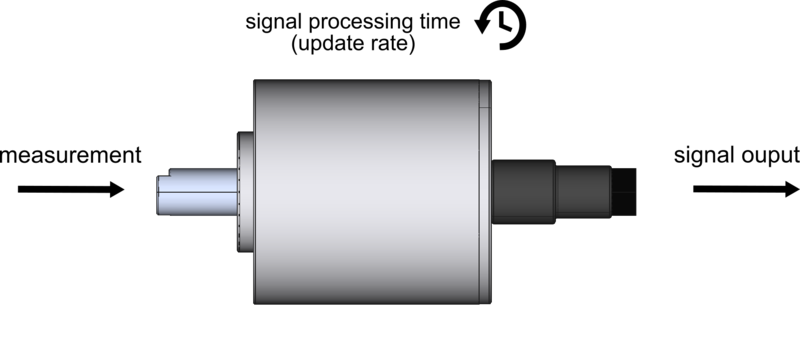
Tasa de actualización
Dado que muchos encoders Hall están equipados con circuitos integrados (CI) digitales que siempre envían sus señales con un cierto retraso, la frecuencia de actualización en milisegundos debe tenerse en cuenta en la aplicación. La tasa de actualización es el período de tiempo entre la adquisición del valor medido y la salida de la señal en el codificador angular. El intervalo de tiempo suele oscilar entre 96 µs y 600 µs en el caso de los codificadores angulares magnéticos con procesamiento digital de la señal, pero puede ser de hasta 3 ms en algunos encoders multivuelta.
Si se aumenta la frecuencia de actualización, se produce un mayor consumo de corriente del encoder. Algunos codificadores angulares también pueden pedirse con una frecuencia de actualización reducida para favorecer un menor consumo de energía, por ejemplo 600 µs en lugar de 200 µs. Por lo tanto, estos encoders son especialmente adecuados para su uso en una aplicación alimentada por baterías con bajo consumo de energía. Si se desea una frecuencia de actualización modificada del codificador angular, ésta debe pedirse de fábrica. La frecuencia de actualización no debe confundirse con la frecuencia de muestreo.
Desviaciones angulares - Linealidad absoluta
El cálculo del posible error angular de un encoder es complejo y depende de muchos factores, como las influencias ambientales (temperatura), los factores mecánicos (holgura de los rodamientos), las tolerancias de los componentes de la electrónica y muchos más. Para poder seguir determinando el error angular de un codificador absoluto de forma fiable y rápida, ha resultado práctico un cálculo basado en la linealidad absoluta. La linealidad absoluta describe la mayor desviación porcentual posible de la función de salida de la señal (del resultado de la medición) en comparación con una línea recta ideal. Sin embargo, estas especificaciones se aplican bajo las siguientes condiciones:
- Funcionamiento del eje en un sentido de rotación
- Funcionamiento a temperatura ambiente
- Referencia a un ángulo de rotación eléctricamente efectivo especificado en la hoja de datos
- La linealidad absoluta es una consideración del "peor caso".
- En la práctica, el error angular real será menor.
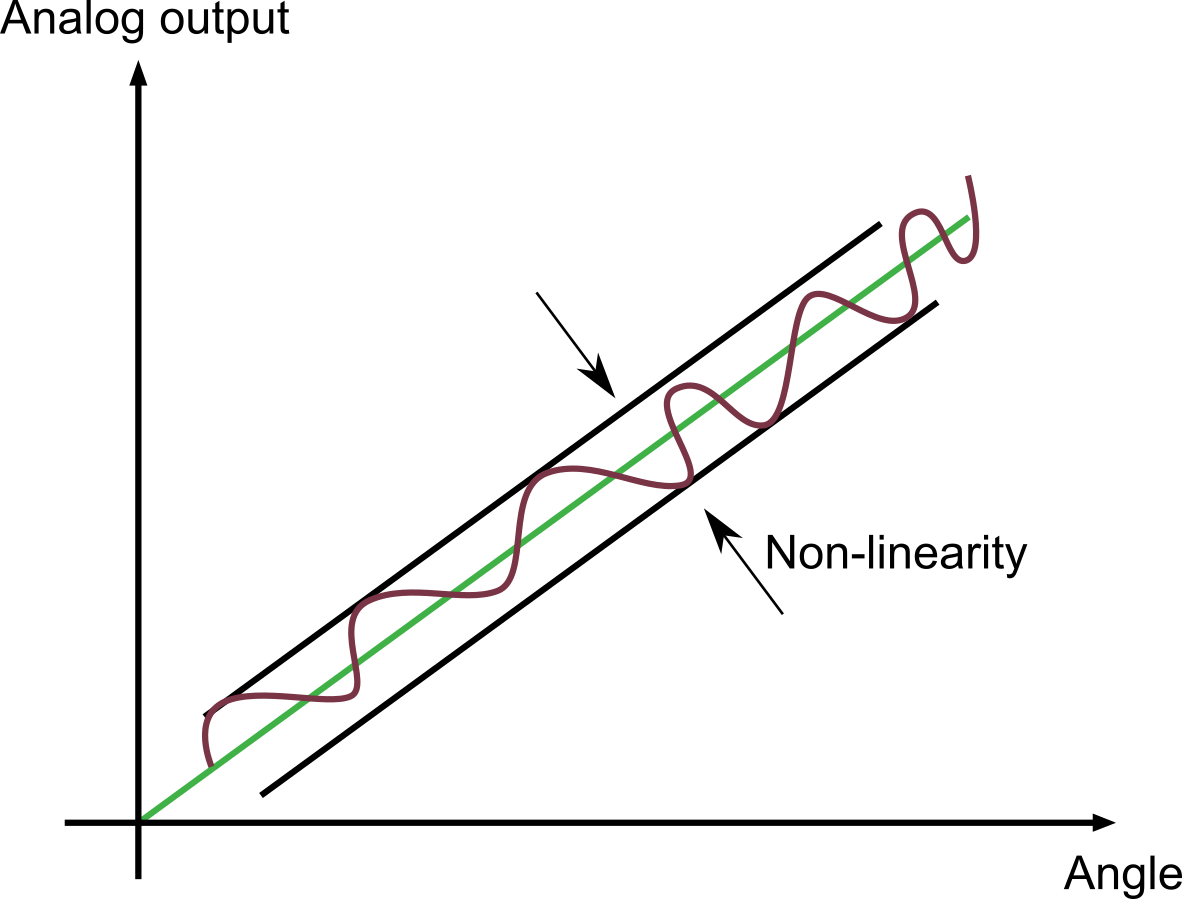
La linealidad absoluta describe la desviación de la señal (rojo) respecto a una línea recta ideal (verde) que pasa por el punto cero.
El error angular de los encoders absolutos sin contacto es reproducible para cada encoder individual. Esto significa que el error es siempre muy parecido para un ángulo de rotación determinado. La alta repetibilidad de un codificador absoluto sin contacto permite, por tanto, compensar la función de salida de la señal con una función de calibración almacenada en la unidad de evaluación para reducir el error angular del codificador. La información sobre la linealidad absoluta es una cantidad fija en la hoja de datos de los codificadores absolutos. La información de la línea recta absoluta en la hoja de datos de un codificador kit (sin eje) se da bajo el supuesto de que el eje central del imán está alineado con el eje central del codificador. Algunas hojas de datos de los encoders magnéticos kit también informan de cómo cambia el valor de la linealidad absoluta cuando el imán se coloca de forma excéntrica con respecto al eje central.
Encoder absoluto monovuelta y multivuelta
Encoder absoluto monovuelta
Los encoders monovuelta son codificadores absolutos que sólo son adecuados para medir ángulos ≤ 360°, ya que su señal de salida vuelve a mostrar el mismo valor que a 0° después de una vuelta completa. Por lo tanto, la mayoría de los encoders absolutos sin contacto miden un rango angular de 0° a un máximo de 360°. Asimismo, en esta categoría también se incluyen los modelos que tienen un rango angular restringido, como ±45°.
Encoder absoluto multivuelta
Los encoders multivuelta son capaces de medir ángulos más allá del punto cero, es decir, más allá de 360°. Esto es posible porque el sistema de medición es capaz de contar el número de revoluciones. A menudo, la señal aumenta de forma continua en toda la gama de ángulos especificada. Por ejemplo, el encoder absoluto multivuelta ETA25PM de MEGATRON es capaz de medir rangos angulares de hasta un máximo de 72000° (hasta 200 revoluciones del eje) y este rango puede limitarse mediante programación. De fábrica están programados 3600º (10 revoluciones). Sin embargo, para ángulos de medición >360°, el sensor puede girar un máximo de ±179° en estado sin tensión, de lo contrario perderá su valor de medición.

Para evitar este hecho, existen los encoders True-Power-On. Tienen la capacidad de emitir la posición angular correctamente en cualquier caso, incluso después de un giro en estado sin tensión. Una posible variante es el uso de una reducción de engranajes, de modo que el eje gira varias veces, pero el imán sólo gira un máximo de 360° dentro del rango de ajuste. Nuestra guía de encoders multivuelta ofrece información más detallada sobre este tema.
Señales de salida eléctricas
Los codificadores absolutos disponen de señales de salida analógicas y digitales.
Señales de salida analógicas para codificadores absolutos:
- Tensión
- Corriente
- PWM (modulación del ancho de pulso)
Señales de salida digitales para codificadores absolutos:
- SPI
- SSI
Salida de corriente y tensión
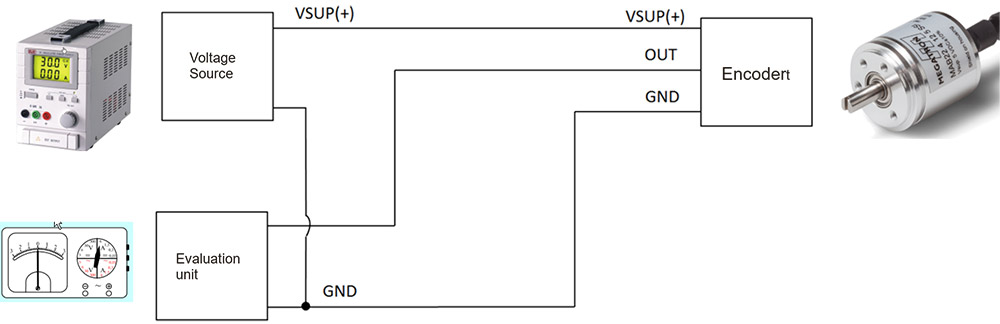
Las salidas analógicas siguen teniendo una gran importancia en el mercado de los codificadores. Por ello, la mayoría de las series se ofrecen también con estas salidas. Los codificadores absolutos de MEGATRON con señales de salida analógicas están diseñados básicamente en tecnología de 3 hilos, a menos que ofrezcan redundancia. Las dos conexiones para la tensión de alimentación (VSUP) y la señal de salida (OUT) tienen una masa común. Muchos codificadores absolutos sin contacto con salidas de señal redundantes están aislados galvánicamente y, por lo tanto, ofrecen tensiones de alimentación, tierras y salidas de señal separadas por rama de señal.
Detección externa de rotura de cable Para realizar una detección externa de rotura de cable a través de una unidad de evaluación, la señal de salida del codificador angular no debe ser cero durante el funcionamiento, independientemente del ángulo, ya que 0 voltios de tensión de salida o 0 mA de corriente de salida son el indicador de una rotura de cable. Para todos los encoders absolutos de MEGATRON con salida de corriente, se puede realizar una detección de rotura de cable externa con la programación de fábrica, ya que el ángulo medido se emite siempre en un rango de 4...20 mA. Con una salida de tensión, tenemos series en el programa que ofrecen esta función de fábrica. Sin embargo, esto no es posible para todos los modelos. Consúltenos si no está seguro.
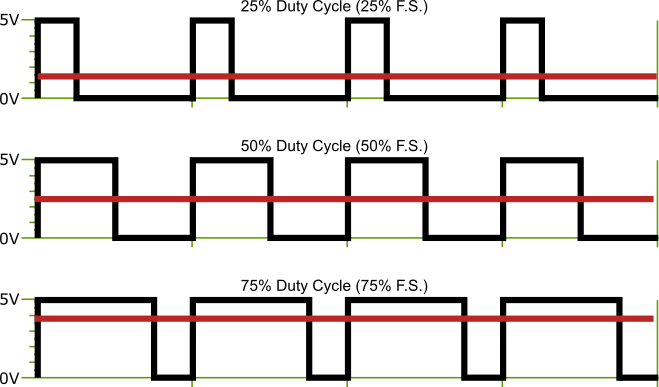
Salida de señal PWM
Con la salida PWM, el ángulo medido no es proporcional a la amplitud de la señal, sino a la anchura del pulso. La ventaja con respecto a las salidas de corriente o de tensión es que esta forma de salida de señal es en gran medida insensible a las interferencias electromagnéticas, ya que éstas suelen ser interferencias con la amplitud de la señal y no con la frecuencia (ejemplo: radiodifusión AM/FM). Sin embargo, la señal debe detectarse en una unidad de evaluación externa diseñada para PWM. El ancho de pulso de los encoders MEGATRON varía entre el 10% (0% F.S.) y el 90% (100% F.S.). La frecuencia de la portadora es de 244 Hz.
Interfaces digitales
Los microcontroladores suelen ofrecer entradas para señales digitales basadas en los formatos SPI y SSI. Para garantizar un alto grado de compatibilidad con un gran número de µcontroladores del mercado, los codificadores absolutos se ofrecen con estas interfaces digitales. Explicar detalladamente las mencionadas interfaces digitales con sus características específicas queda fuera del alcance de esta guía. Por lo tanto, la siguiente explicación sólo sirve de resumen.
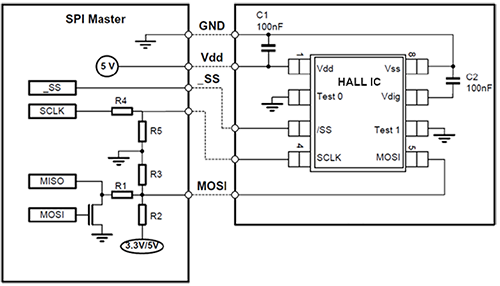
SPI (interfaz de periféricos en serie)
La interfaz SPI se basa en un protocolo de BUS serie maestro/esclavo desarrollado por Motorola. La comunicación se realiza a través de las líneas de datos:
- MOSI (Master Out → Slave In)
- MISO (Master In ← Slave Out)
- SCK (Serial Clock) (=reloj de bus/reloj esclavo).
Además de estas tres líneas, se requiere una línea llamada "Slave Select (SS)" o también "Chip Select (CS)" para cada esclavo. Tenga en cuenta que el formato no es adecuado para la comunicación de campo, ya que la longitud del cable entre el maestro y el esclavo no debe ser superior a 0,6 m. Para más información sobre los codificadores magnéticos MEGATRON con interfaz SPI, póngase en contacto con nosotros.
SSI (Interfaz serie síncrona)
La interfaz SSI es una interfaz muy utilizada para la comunicación de datos en serie. Es especialmente adecuado para la comunicación digital de encoders absolutos en el campo, donde los valores medidos tienen que ser transmitidos a través de largas distancias entre el encoder y la unidad de evaluación. La transmisión de datos (reloj y datos) se realiza a través de cuatro líneas, transmitiendo dos pares de señales en cada caso (transmisión de señales simétricas en fase y giradas 180° en fase). Si las señales de un par de señales se superponen por una perturbación en el trayecto de transmisión entre el esclavo y el maestro, esta perturbación puede eliminarse mediante la formación de diferencias de los dos pares de señales en la unidad de evaluación. Los cables de señal de par trenzado con pares de cables apantallados individualmente son especialmente adecuados para la transmisión fiable de las señales de medición en distancias más largas. Si desea más información sobre la comunicación SSI con los codificadores MEGATRON, póngase en contacto con nosotros.
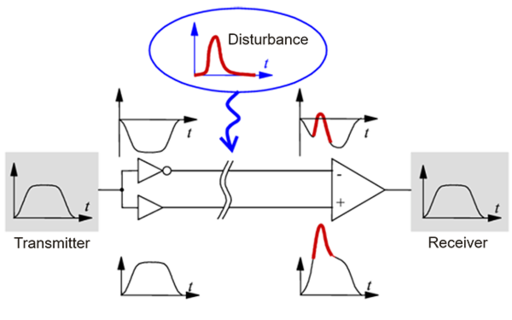
Concepto de eliminación de fallos mediante SSI
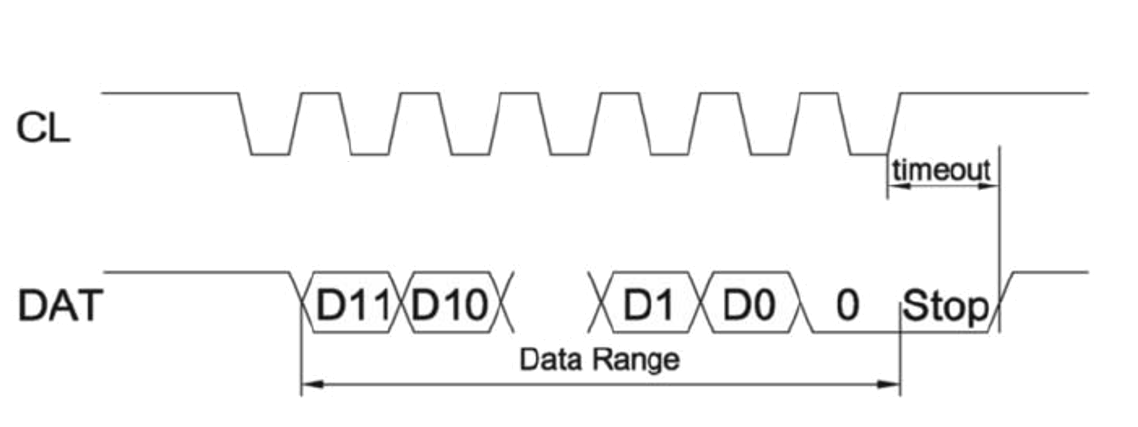
Transmisión de datos en los dos canales Reloj y Datos










Los codificadores absolutos son codificadores rotativos que miden las posiciones angulares en una aplicación, convierten esta información angular en señales eléctricas y las emiten como valores absolutos. Las tecnologías de sensores magnéticos basadas en el efecto Hall proporcionan excelentes resultados de medición con las conocidas ventajas del principio de medición sin contacto y la vida útil prácticamente ilimitada de la tecnología de sensores.
Gracias a la gran selección de salidas de señales eléctricas, conexiones y diseños mecánicos, se dispone de una adquisición de valores medidos fiable, reproducible y exacta para casi cualquier aplicación. El rango de medición angular de un encoder absoluto es de vital importancia. En este caso, los codificadores monovuelta cubren rangos angulares de hasta 360 grados y los codificadores multivuelta cubren ángulos superiores. Mención especial merece la posibilidad de programar una curva de salida de valores absolutos específica para el cliente.
Teniendo en cuenta todos los parámetros posibles, elaboramos la mejor solución de producto posible como respuesta a su consulta. Dado que en las aplicaciones más exigentes, en muchos casos se requiere una adaptación técnica del producto. MEGATRON es su especialista para estos casos y le apoya como socio fiable a largo plazo con productos de calidad garantizada y una alta fiabilidad de entrega desde la consulta hasta la realización, pasando por la producción en serie y más allá hasta el "fin de vida" de su aplicación.