 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Sensores de posición LVDT
Transductores de desplazamiento inductivos con sonda, muelle de retorno, rótulas o núcleo suelto
Guía de estos sensores
Contenido
¿Preguntas básicas sobre los sensores de desplazamiento inductivos? Aquí encontrará las respuestas
Principio de medición lineal inductiva
Los valores medidos se registran sin contacto. Nuestra cartera se compone exclusivamente de sensores de desplazamiento LVDT. En aras de la exhaustividad, se distinguen dos tipos de sensores de desplazamiento inductivos
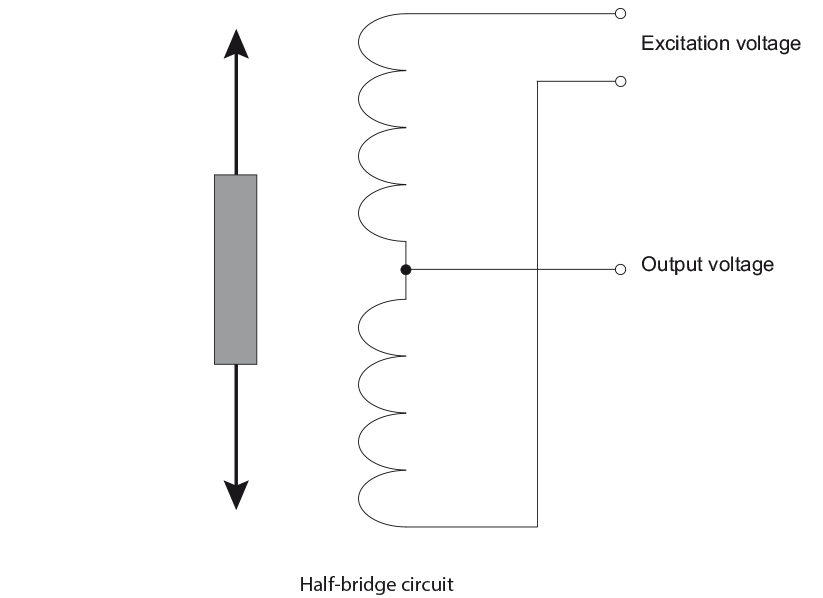
Circuito de medio puente (principio de estrangulación diferencial)
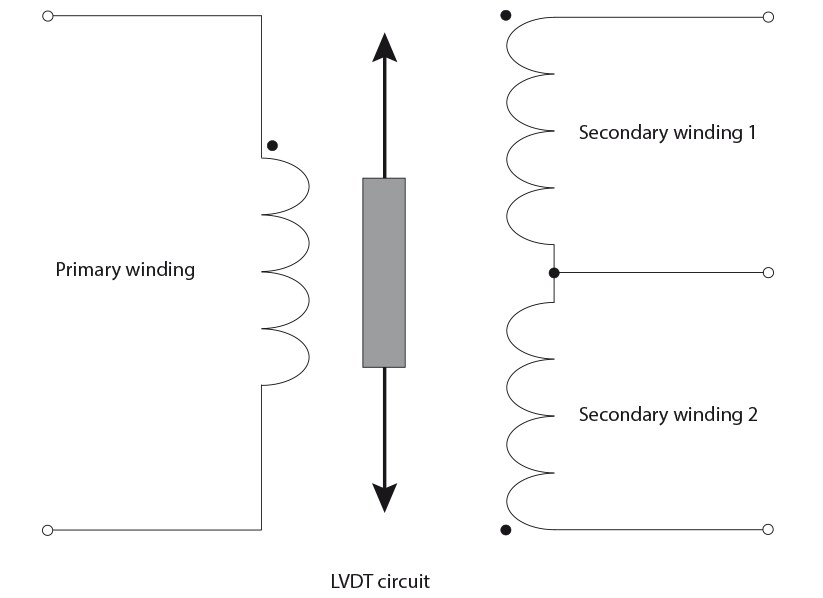
Circuito LVDT (transformador diferencial variable lineal)
Un sensor de desplazamiento LVDT se compone de un cuerpo hueco protegido contra la corrosión y apantallado magnéticamente, una bobina primaria (devanado primario), dos bobinas secundarias en serie (devanados secundarios) y una varilla de empuje con un núcleo de hierro dulce en el extremo (aleación de hierro-níquel altamente permeable). La varilla de empuje puede moverse axialmente en el cuerpo hueco sobre las bobinas sin contacto y utiliza el principio de medición inductiva como transformador diferencial variable lineal: LVDT.
El devanado primario suele alimentarse con una tensión alterna (tensión de excitación o tensión primaria) con una frecuencia constante en el rango de 1...10 kHz. Esta tensión alterna se induce en las bobinas secundarias -según la posición del núcleo de hierro dulce- en los dos devanados secundarios, por lo que las bobinas secundarias están conectadas en serie en fase opuesta.
En comparación con el circuito de medio puente, el LVDT ofrece la ventaja de que las bobinas del LVDT están enrolladas de tal manera que los cambios mecánicos de longitud de las bobinas, causados por los cambios de temperatura, se compensan en gran medida.
Si el núcleo de hierro dulce está exactamente en el centro entre las bobinas secundarias, la tensión de salida es de 0 V porque los campos magnéticos de las bobinas secundarias se anulan entre sí. Si el núcleo de hierro dulce se desplaza axialmente, la tensión inducida cambia en función de la dirección: aumenta de forma constante en una bobina secundaria y, al mismo tiempo, la tensión en la otra bobina secundaria disminuye de forma constante.
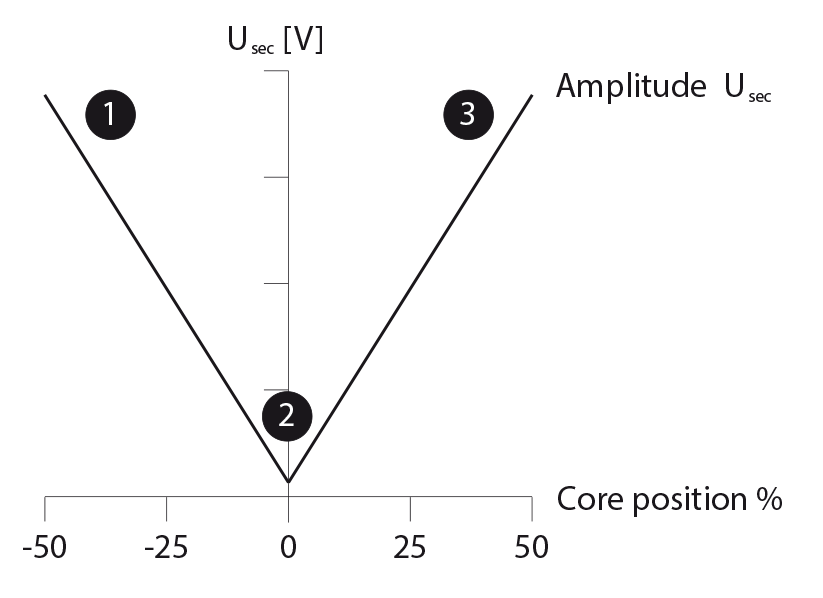
Estado 1: Mover el núcleo de hierro dulce hacia la derecha para que sea un acoplamiento desigual y la tensión aumente. (1)
Estado 2: Si el núcleo de hierro dulce está en medio de las dos bobinas secundarias, la tensión de salida es de 0 V (2) porque los campos magnéticos de ambas bobinas secundarias se anulan.
Estado 3: Mover el núcleo de hierro dulce hacia la izquierda para que sea un acoplamiento desigual y la tensión también aumente. (3)
Según el circuito, la señal de salida es la diferencia entre estas dos tensiones. Esto significa que la señal de salida disminuye / aumenta en función de la dirección cuando el núcleo se desplaza a la posición media y aumenta / disminuye de nuevo cuando se desplaza más allá con una rotación de fase de 180°.
Ventajas de los sensores LVDT

- Los pequeños recorridos de medición se pueden implementar muy bien
- Sin desgaste ni mantenimiento
- Principio de medición absoluta - sin desplazamiento
- Muy adecuado para los movimientos oscilantes
- Adecuado para temperaturas muy altas
- En gran medida insensible a los cambios de temperatura gracias a la tecnología LVDT
- Versiones estancas para alta presión atmosférica
- Adecuado para altas velocidades de ajuste
- Resistente a la EMC con una selección adecuada de materiales
Señal, Amplificador, Protocolo

Un LVDT es un transformador diferencial que se alimenta de una tensión alterna (CA) y genera también una tensión alterna (CA) como señal de salida.
Para obtener una señal de salida versátil, los transductores de desplazamiento inductivos se ofrecen con una electrónica de procesamiento posterior adecuada, como IMA2 LVDT, o con una electrónica de amplificación de medición integrada. Este último consta de un oscilador para generar la tensión de excitación, un demodulador y una imagen diferencial, así como un amplificador de salida con filtro. Gracias a los diferentes rangos de tensión de salida realizables, los transductores de desplazamiento pueden adaptarse fácilmente a una gran variedad de dispositivos de medición, control y regulación.
La relación de las tensiones es evaluada diferencialmente por la electrónica y suele convertirse en una señal de salida normalizada (0...10 V, 4...20 mA, etc.). Dentro del rango de medición especificado, los sensores LVDT tienen una muy buena linealidad.
Tensión de alimentación - tensión de salida: Para los sistemas inductivos con módulo amplificador externo, se requiere una tensión de entrada de 10 VRMS entre 500 Hz - 5 kHz. Los tipos de CC-CD se fijan en su mayoría en ±15 voltios o 24 VCC.
Sin embargo, si, por ejemplo, un transductor de desplazamiento potenciométrico tiene una fuente de alimentación de CC y una electrónica de procesamiento posterior para las señales de medición de CC, un transductor de desplazamiento inductivo puede estar equipado con una electrónica de CC que genere la tensión de CA internamente en el transductor (oscilador) y convierta la señal de medición de nuevo en una tensión de CC (demodulador), como se muestra esquemáticamente en el croquis 2. Así, el transductor de desplazamiento DG se alimenta simplemente con una tensión de ±15V o 24V DC y entrega 0..5 V / ±5 V / 0..10 V / ±10 V / 0..20 mA / 4..20 mA como valor medido en la salida.
Se incluye el certificado de medición con todos los datos importantes sobre la tolerancia de linealidad, la sensibilidad, etc.






Los sensores lineales inductivos son sistemas de medición absolutos y robustos con una resolución de hasta 20 µm. Son adecuados para aplicaciones con carreras pequeñas y, sobre todo, para aplicaciones en las que hay que detectar movimientos oscilantes con alta dinámica o altas aceleraciones. También se pueden realizar aplicaciones que requieran versiones estancas, resistentes a la presión de hasta 30 bares.
Nuestros sensores lineales LVDT detectan trayectorias de medición mecánicas de 1,3 mm a 940 mm. Además, la vida del sensor es ilimitada porque el valor medido se registra sin contacto. Para una amplia gama de aplicaciones, hay variantes disponibles como sondas con muelle de retorno, con núcleo suelto o con cabezales con rótulas para compensar la desalineación lateral.
Y a pesar de la riqueza de variantes, algunas aplicaciones exigentes requieren la adaptación de los sensores. MEGATRON es su socio para este proceso de adaptación. Para la realización de tareas de medición especiales, ponemos a su disposición nuestra larga experiencia y nuestros amplios conocimientos de aplicación para el diseño óptimo; y eso ya desde cantidades relativamente pequeñas.