 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Codeur absolu
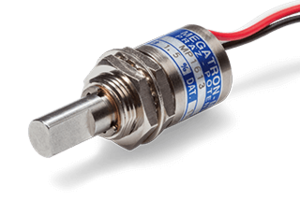
Capteurs rotatifs magnétiques pour la mesure absolue d'angles
Guide codeur absolu
Contenu
Qu'est-ce qu'un encodeur absolu ?
Les codeurs absolus sont des capteurs rotatifs qui mesurent des angles, convertissent ces informations en signaux électriques et les émettent sous forme d'une valeur absolue. L'utilisation d'une électronique pour le traitement des valeurs de mesure les différencie des potentiomètres, qui fournissent également des valeurs absolues, mais qui sont des composants passifs sans électronique intégrée. Dans le cas des codeurs absolus, il existe un point zéro fixe comme point de référence pour la mesure angulaire, auquel la valeur de sortie est rapportée à tout moment. Le principe d'un codeur absolu est fondamentalement différent de celui des codeurs incrémentaux, par exemple, où seules les variations angulaires (valeurs relatives) sont transmises par le codeur. Les codeurs absolus sont classés en deux catégories en fonction de la plage angulaire à détecter. Les capteurs rotatifs absolus qui enregistrent des angles sur plusieurs tours sont appelés capteurs rotatifs multitours et les capteurs rotatifs absolus qui enregistrent des angles jusqu'à 360° sont appelés capteurs rotatifs monotours.
Programmation de signaux de codeurs absolus
Les codeurs absolus offrent de nombreuses possibilités de représenter les valeurs angulaires mesurées sous la forme d'une fonction électrique de signalisation à la sortie. L'électronique de nombreux codeurs est programmable et permet de concevoir les courbes de sortie en fonction des besoins du client. L'exemple suivant montre la programmation standard en usine d'un codeur absolu analogique : le codeur est programmé dans le sens de rotation CW avec un signal de sortie de 0...10 V (si l'arbre tourne dans le sens des aiguilles d'une montre) et enregistre un angle de 0...360°. S'il se trouve à 0°, il émet 0 V. Si l'arbre est tourné de 90° dans le sens des aiguilles d'une montre, il fournit alors une valeur de 90°/360° * 10 V = 2,5 V. Tant que l'arbre du codeur n'est pas déplacé, cette valeur reste constante. L'illustration de l'exemple 1 montre l'évolution du signal d'un tel codeur absolu.
| Angle mesuré [° degrés] | Tension de sortie [Volt] |
| 0° = 0 V | 0 V |
| 360° = 10 V | 10 V |
| 45° = 1,25 V | 1,25 V |
| 90° = 2,5 V | 2,5 V |
| 180° = 5,0 V | 5 V |
Pour avoir une référence à l'ensemble de la plage de sortie du signal, on utilise souvent le terme "full scale" (en anglais) avec l'abréviation "F.S.". Dans l'exemple ci-dessus, par exemple, F.S. = 10 V. Maintenant, sans connaître la tension maximale, on peut aussi convenir de la programmation au moyen de valeurs en pourcentage. Par exemple, 0° correspond à 0% F.S. (0% de la valeur maximale, c'est-à-dire 0 V) et 360° à 100% F.S. (100% de la valeur maximale, c'est-à-dire 10 V). Ainsi, une fonction de sortie de signal peut être décrite avec précision sans utiliser de représentation graphique :
0° = 0% F.S. 90° = 100% F.S. 180° = 100% F.S. 270° = 0% F.S. 360° = 0% F.S.
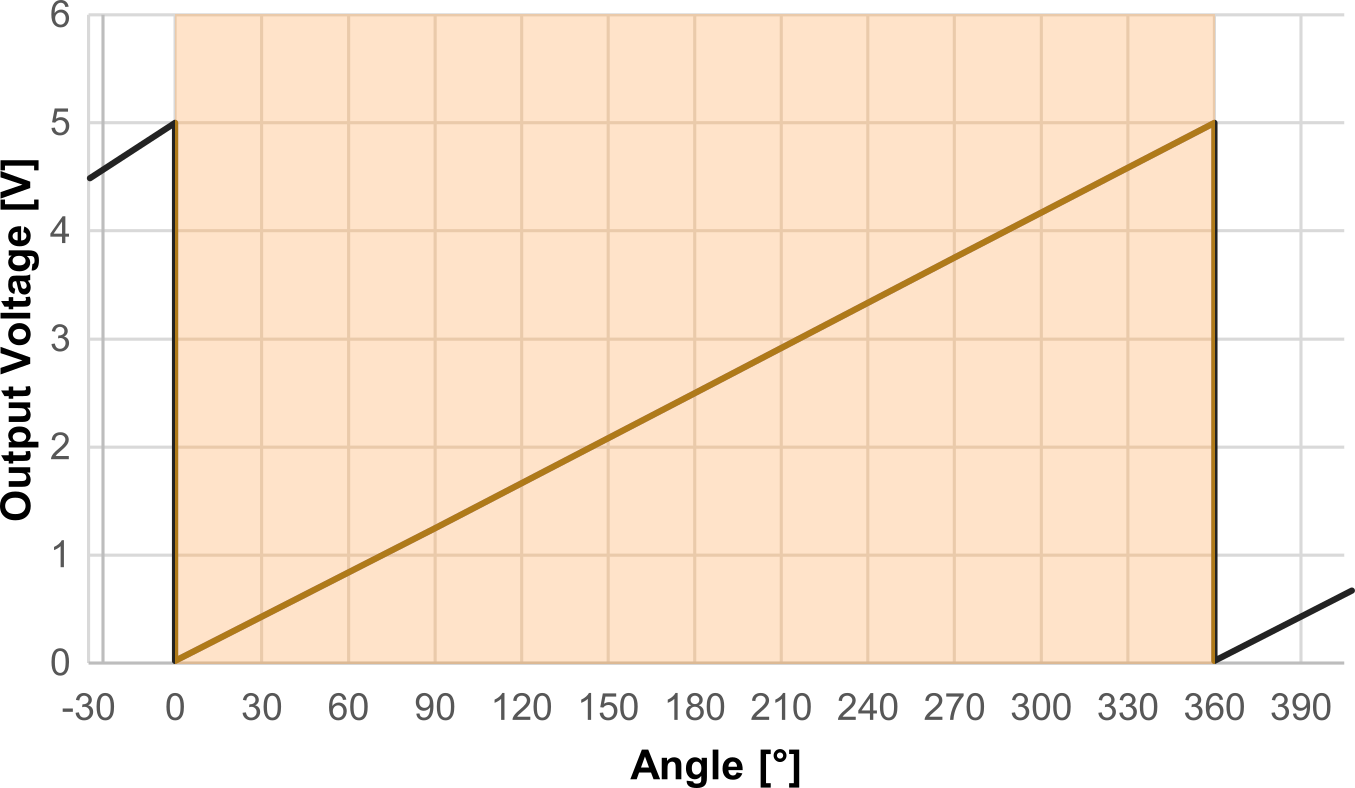
Exemple 1
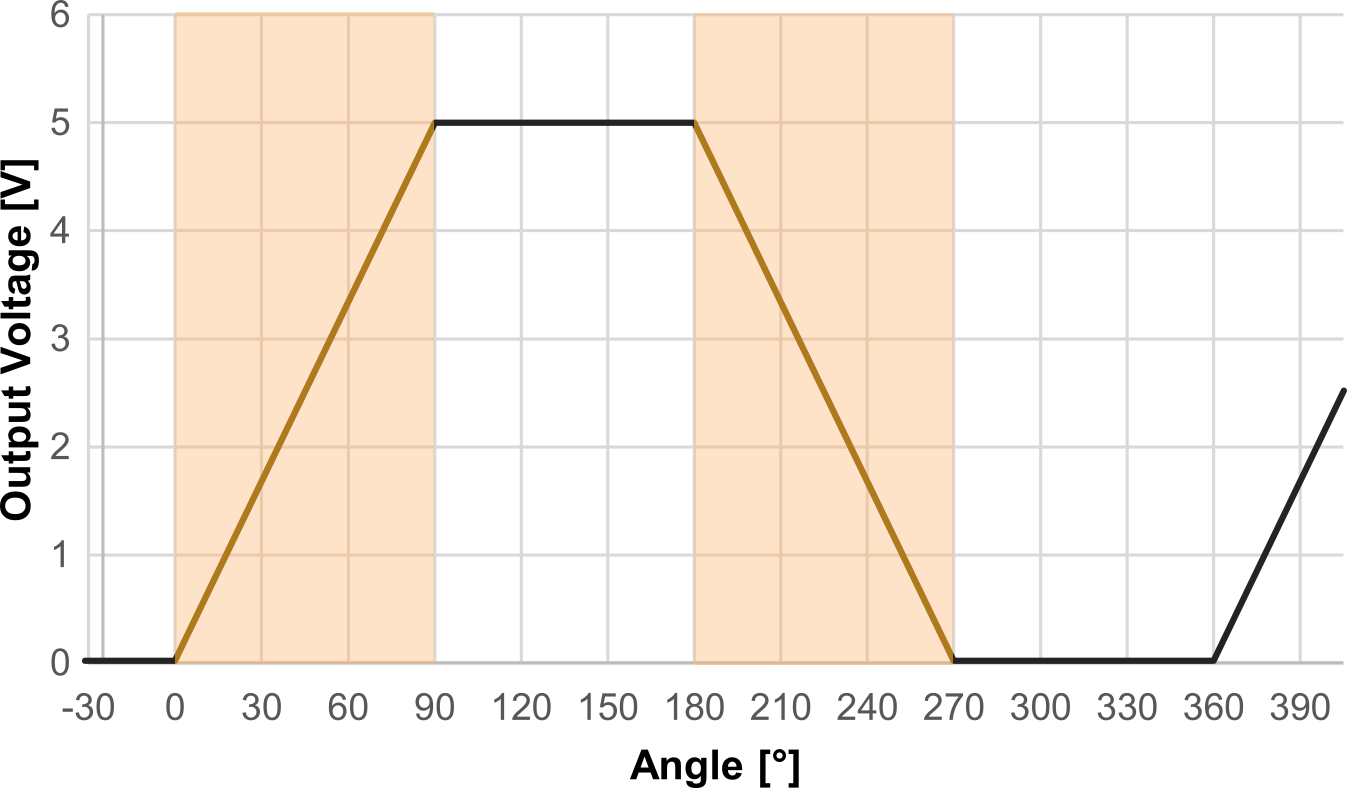
Exemple 2
La figure montre l'évolution du signal pour ces exigences dans l'exemple 2. Pour les codeurs absolus, les signaux de sortie peuvent également être émis au moyen d'autres interfaces, par exemple sous forme de courant de sortie ou par modulation de largeur d'impulsion (PWM).
Codeur à effet Hall
L'effet Hall est un phénomène par lequel une tension électrique est générée dans un conducteur parcouru par un courant (élément Hall) lorsque celui-ci se trouve dans un champ magnétique externe. L'effet est représenté dans l'image ci-contre et peut être expliqué comme suit : Lorsque le courant circule dans un conducteur électrique, des porteurs de charge se déplacent à travers le conducteur. Si un champ magnétique supplémentaire, par exemple un aimant externe, agit sur le conducteur, les porteurs de charge sont déviés perpendiculairement au sens du courant. La raison en est la force de Lorentz : elle dévie les porteurs de charge lorsqu'ils se déplacent et lorsqu'un champ magnétique externe agit. Les électrons s'accumulent alors sur les bords du conducteur. La séparation des charges crée une tension supplémentaire perpendiculaire au sens du courant, appelée tension de Hall.
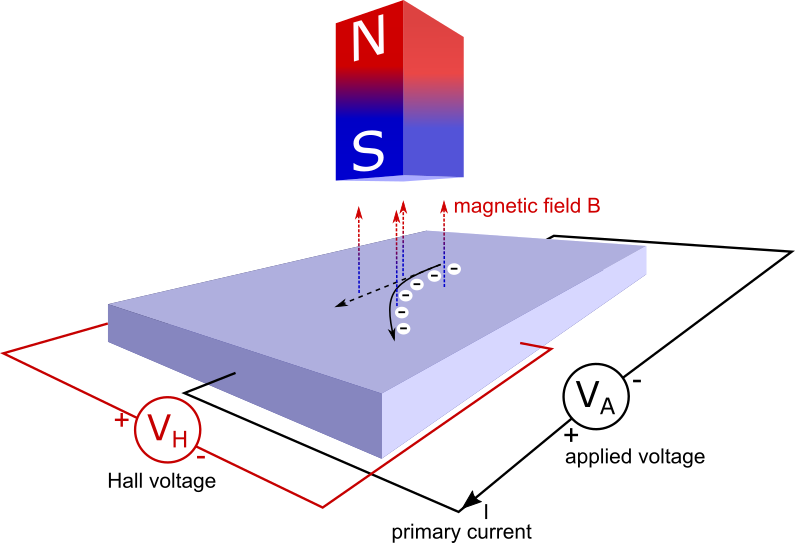
Un champ magnétique génère une tension de Hall dans un conducteur parcouru par un courant électrique
Si le champ magnétique extérieur varie en raison du mouvement de l'aimant, la tension de Hall varie également - il est ainsi possible de réaliser des capteurs relativement simples. Si l'on place par exemple un aimant permanent circulaire diamétralement magnétisé (pôle nord/pôle sud) au-dessus d'un élément à effet Hall et que l'on soumet cet aimant à un mouvement de rotation, on peut alors mesurer une courbe de tension de sortie sinusoïdale. Si la position de l'aimant ne change pas, la valeur mesurée reste également constante. Cependant, un capteur à effet Hall ne peut fonctionner que si un courant circule, sinon la force de Lorentz n'agit pas. C'est pourquoi les capteurs à effet Hall ont besoin de courant pour fonctionner, même si la position de mesure ne change pas.
Capteurs à effet Hall basés sur le gradient
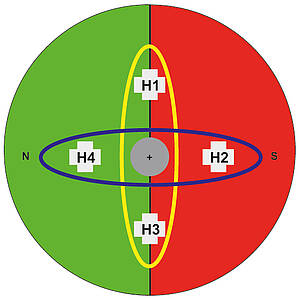
Les champs magnétiques extérieurs peuvent en principe perturber la technologie à effet Hall, à moins que des précautions ne soient prises pour les éviter. Aujourd'hui, on utilise ce que l'on appelle des capteurs à effet Hall à gradient, qui sont largement insensibles à ces perturbations. Le principe de cette variante particulière est que deux ou plusieurs capteurs à effet Hall sont placés à proximité immédiate les uns des autres. L'aimant de mesure, qui est très proche de ces deux capteurs, produit une différence dans le signal des deux capteurs, car la courbure du champ est relativement forte. Un champ perturbateur extérieur, qui a généralement une faible courbure, est toutefois "vu" de la même manière par les deux capteurs. Si maintenant seule la différence entre les deux capteurs est évaluée (le gradient), pratiquement seul l'aimant de mesure est perçu et le système de mesure est ainsi très robuste contre les champs parasites extérieurs.
Résolution
La plupart des codeurs de hall sont des codeurs numériques et traitent les signaux de mesure avec une certaine résolution. L'information est traitée avec une précision qui correspond au nombre de bits. Plus cette valeur est élevée, plus les signaux peuvent être traités avec finesse. Les courbes de sortie analogiques des appareils numériques présentent donc toujours une fine gradation dont la hauteur est déterminée par la résolution. Les résolutions typiques sont de 10 bits, 12 bits ou 14 bits, selon le modèle de codeur. Par exemple, la résolution angulaire est de 0,088° pour 12 bits et de 0,022° pour 14 bits. Pour déterminer ces valeurs, l'observation simple suivante est utile :
- La résolution permet de calculer le nombre de changements d'état pouvant être représentés : 1 bit correspond à 2 changements d'état (puisque21 = 2), 12 bits correspondent à 4096 changements d'état (puisque212 = 4096).
- Le nombre de changements d'état se répartit sur toute la plage de l'angle de rotation électrique.
Pour calculer la résolution angulaire, il faut diviser l'angle de rotation électriquement efficace par le nombre d'états possibles :
\(\text {résolution angulaire en degrés} =\frac {360°} {2^\text {nombre de bits}}\)
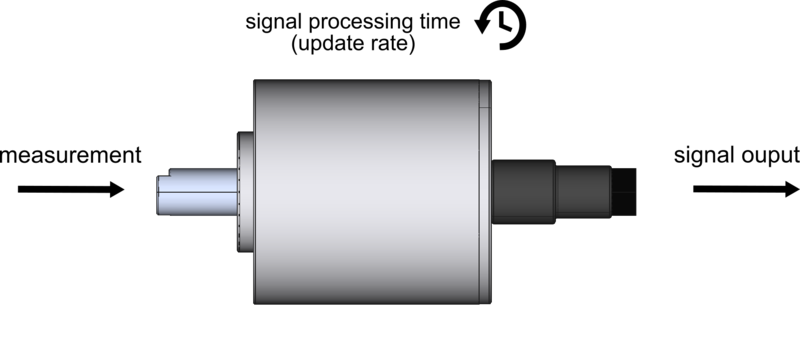
Taux de mise à jour
Comme de nombreux capteurs rotatifs à effet Hall sont équipés de circuits intégrés numériques (CI) qui envoient toujours leurs signaux avec un certain retard, le taux de mise à jour en millisecondes doit être pris en compte dans l'application. Le taux de mise à jour est la durée entre l'acquisition de la valeur mesurée et l'émission du signal dans le codeur angulaire. Il se situe généralement entre 96 µs et 600 µs pour les codeurs angulaires magnétiques avec traitement numérique des signaux, mais il peut atteindre 3 ms pour certains codeurs multitours.
L'augmentation de la fréquence de mise à jour entraîne en contrepartie une augmentation de la consommation de courant du codeur angulaire. Certains encodeurs angulaires peuvent être commandés avec une fréquence de mise à jour réduite, par exemple 600 µs au lieu de 200 µs, afin de réduire la consommation de courant. Ces encodeurs angulaires sont alors particulièrement adaptés à une utilisation sur batterie avec une faible consommation d'énergie. Si une fréquence de mise à jour modifiée du codeur angulaire est souhaitée, elle doit être commandée en usine. Il ne faut pas confondre le taux de mise à jour et le taux d'échantillonnage.
Ecarts angulaires - Linéarité absolue
Le calcul de l'erreur angulaire possible d'un codeur est complexe et dépend de nombreux facteurs tels que les influences environnementales (température), les facteurs mécaniques (jeu des roulements), les tolérances des composants électroniques et bien d'autres encore. Afin de pouvoir malgré tout déterminer de manière fiable et rapide l'erreur angulaire pour un codeur absolu, un calcul basé sur la linéarité absolue s'est avéré pratique. La linéarité absolue décrit la plus grande déviation en pourcentage possible de la fonction de sortie du signal (du résultat de mesure) par rapport à une droite idéale. Ces données sont toutefois valables dans les conditions suivantes :
- Actionnement de l'arbre dans un sens de rotation
- fonctionnement à température ambiante
- Référence à un angle de rotation électriquement efficace indiqué dans la fiche technique.
- En ce qui concerne la linéarité absolue, il s'agit d'une considération "au pire".
- Dans la pratique, l'erreur angulaire réelle sera plus faible.
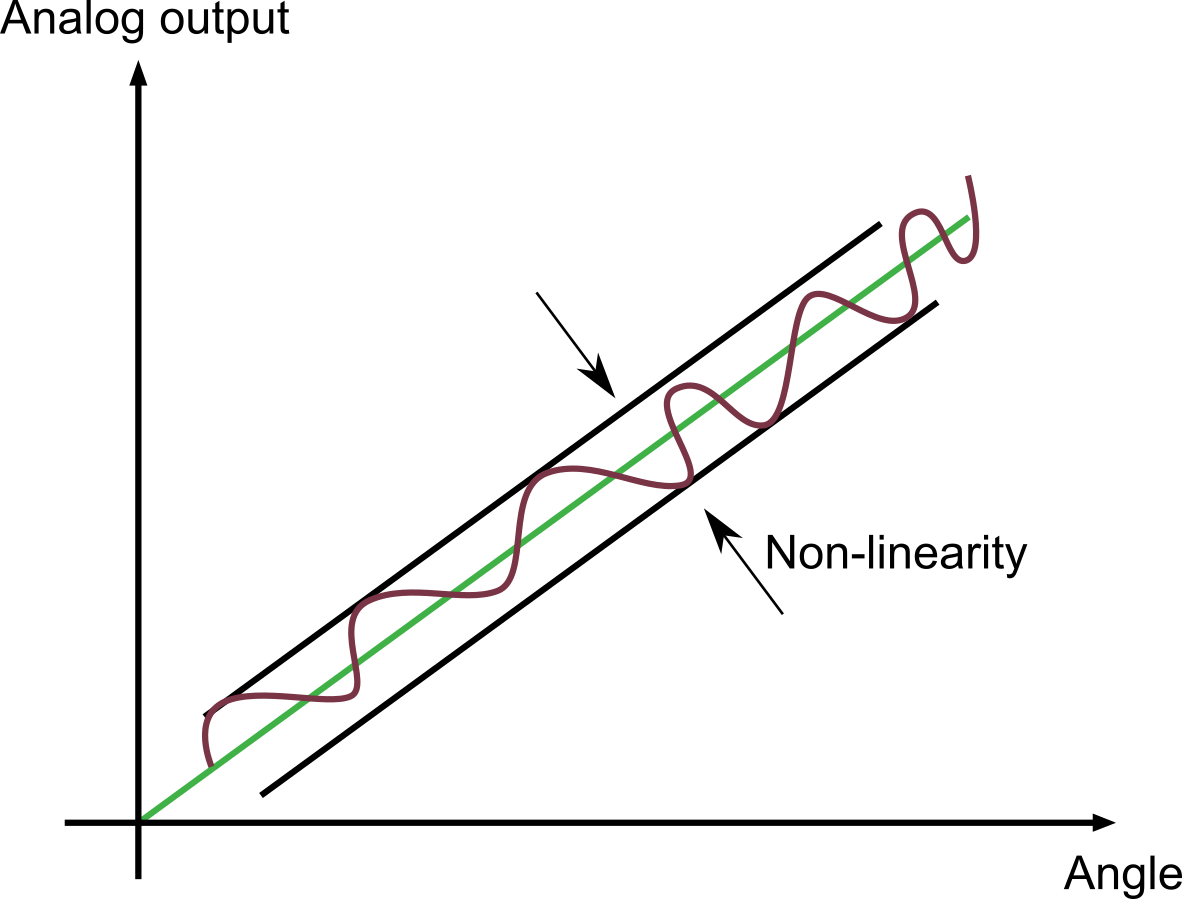
La linéarité absolue décrit l'écart du signal (rouge) par rapport à une droite idéale (verte) qui passe par le point zéro.
L'erreur angulaire est reproductible pour les codeurs absolus sans contact pour chaque codeur individuel. Cela signifie que l'erreur est toujours largement identique pour un angle de rotation donné. La grande répétabilité d'un codeur absolu sans contact permet donc de calculer la fonction de sortie du signal avec une fonction de calibrage enregistrée dans l'unité de contrôle afin de réduire l'erreur angulaire du codeur. L'information sur la linéarité absolue est une donnée fixe dans la fiche technique des codeurs absolus. L'information de la ligne droite absolue dans la fiche technique d'un codeur en kit (sans arbre) est donnée en supposant que l'axe central de l'aimant est aligné avec l'axe central du codeur. Certaines fiches techniques de codeurs magnétiques en kit indiquent en outre comment la valeur de la linéarité absolue est modifiée lorsque l'aimant est positionné de manière excentrée par rapport à l'axe central.
Codeurs absolus monotour et multitours
Codeur absolu monotour
Les codeurs monotour sont des codeurs absolus qui ne conviennent qu'à la mesure d'angles ≤ 360°, car leur signal de sortie affiche à nouveau la même valeur qu'à 0° après un tour complet. La plupart des codeurs absolus monotour sans contact mesurent donc une plage angulaire de 0° à 360° maximum. De même, cette catégorie comprend également des modèles dont la plage angulaire est limitée, par exemple ±45°.
Codeur absolu multitour
Les capteurs rotatifs multitours sont capables de mesurer des angles au-delà du point zéro, c'est-à-dire au-delà de 360°. Cela est possible parce que le système de mesure est capable de compter le nombre de tours. Souvent, le signal augmente continuellement sur toute la plage angulaire spécifiée. Par exemple, le codeur absolu multitour ETA25PM de MEGATRON est capable de mesurer des plages angulaires allant jusqu'à 72000° maximum (jusqu'à 200 tours d'arbre) et la programmation permet de restreindre cette plage. En usine, 3600° sont programmés pour celui-ci (10 tours). Pour la mesure d'angles >360°, le capteur ne doit cependant pas être tourné de plus de ±179° hors tension, sinon il perd sa valeur de mesure.

Pour éviter ce problème, il existe des codeurs True Power On. Ils ont la capacité d'indiquer correctement la position angulaire dans tous les cas, même après un état hors tension. Une variante possible est l'utilisation d'un réducteur, de sorte que l'arbre tourne plusieurs fois, mais que l'aimant ne tourne que de 360° au maximum dans la plage de réglage. Notre guide sur les codeurs multitours fournit des informations plus détaillées sur ce sujet.
Sorties de signaux électriques
Pour les codeurs absolus, des sorties de signal analogiques et numériques sont disponibles.
Sorties de signaux analogiques pour codeurs absolus :
- Tension
- Courant
- PWM (modulation de largeur d'impulsion)
Sorties de signaux numériques pour codeurs absolus :
- SPI
- SSI
Sortie de courant et de tension
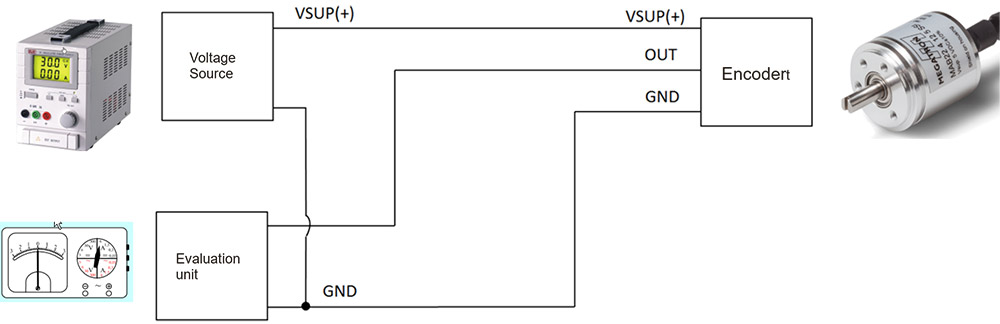
Les sorties analogiques sont toujours très importantes sur le marché des codeurs. C'est pourquoi la plupart des séries sont proposées avec ces sorties. Les codeurs absolus de MEGATRON avec sorties de signaux analogiques sont en principe construits en technique 3 fils, sauf s'ils offrent une redondance. Les deux connexions pour la tension d'alimentation (VSUP) et le signal de sortie (OUT) ont une masse commune. De nombreux codeurs absolus sans contact avec des sorties de signal redondantes sont séparés galvaniquement et offrent donc des tensions d'alimentation, des masses et des sorties de signal séparées pour chaque branche de signal.
Détection externe de rupture de fil Pour réaliser une détection externe de rupture de fil via une unité d'évaluation, le signal de sortie du codeur angulaire ne doit pas être nul en fonctionnement, indépendamment de l'angle, car une tension de sortie de 0 volt ou un courant de sortie de 0 mA sont les indicateurs d'une rupture de fil. Pour tous les codeurs absolus MEGATRON avec sortie de courant, la programmation en usine permet de réaliser une détection externe de rupture de fil, car l'angle mesuré est toujours émis dans une plage de 4...20 mA. Pour une sortie en tension, nous avons dans notre programme des séries qui offrent cette fonction en usine. Cependant, cela n'est pas possible pour tous les modèles. En cas de doute, veuillez nous contacter.
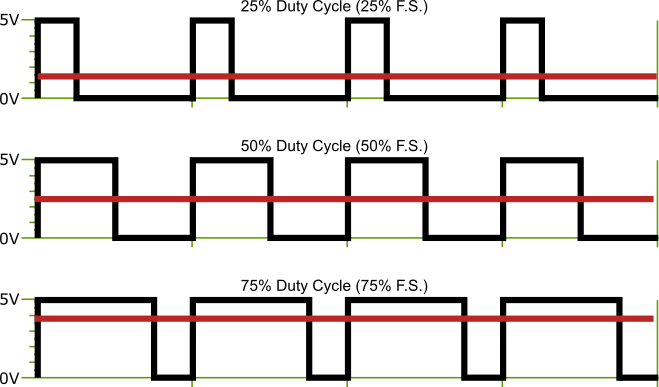
Sortie de signal PWM
Avec la sortie PWM, l'angle mesuré n'a pas un rapport proportionnel à l'amplitude du signal, mais à la largeur d'impulsion. L'avantage par rapport aux sorties de courant ou de tension réside dans le fait que cette forme de sortie de signal présente une grande insensibilité aux perturbations électromagnétiques, car les perturbations EM sont généralement des perturbations de l'amplitude du signal et non de la fréquence (exemple : radiodiffusion AM/FM). Le signal doit toutefois être détecté dans une unité d'évaluation externe conçue pour la MLI. Pour les codeurs MEGATRON, la largeur d'impulsion varie entre 10% (0% F.S.) et 90% (100% F.S.). La fréquence porteuse est de 244 Hz.
Interfaces numériques
Les microcontrôleurs offrent souvent des entrées pour des signaux numériques basés sur les formats SPI et SSI. Afin de garantir une compatibilité élevée avec un grand nombre de microcontrôleurs disponibles sur le marché, les codeurs absolus sont proposés avec ces interfaces numériques. Expliquer en détail les interfaces numériques mentionnées et leurs caractéristiques spécifiques dépasse le cadre de ce guide. Les explications suivantes servent donc uniquement à donner un aperçu compact.
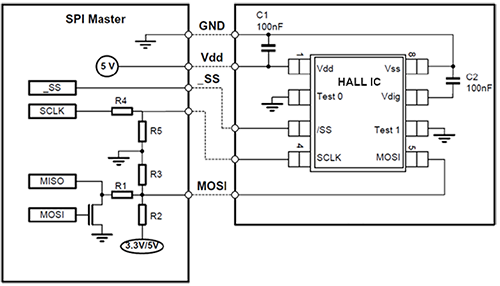
SPI (Serial Peripheral Interface)
L'interface SPI est basée sur un protocole de bus série maître/esclave, qui a été développé par la société Motorola. La communication s'effectue via les lignes de données :
- MOSI (Master Out → Slave In)
- MISO (Master In ← Slave Out)
- SCK (Serial Clock) (= horloge du bus / horloge de décalage).
En plus de ces trois lignes, une ligne appelée "Slave Select (SS)" ou encore "Chip Select (CS)" est nécessaire pour chaque esclave. Veuillez noter que ce format n'est pas adapté à une communication sur le terrain, car la longueur du câble entre le maître et l'esclave ne doit pas dépasser 0,6 mètre. Pour plus d'informations sur les codeurs magnétiques MEGATRON avec interface SPI, veuillez nous contacter.
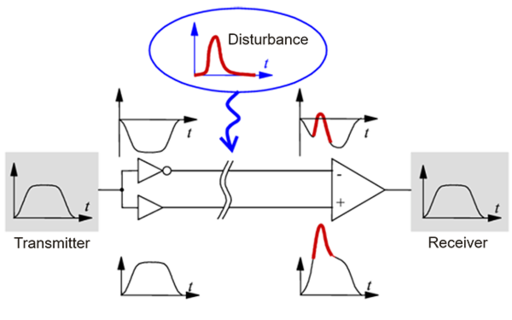
SSI (interface sérielle synchrone)
L'interface SSI est une interface très répandue pour la communication de données en série. Elle est particulièrement adaptée à la communication numérique des codeurs absolus sur le terrain, où les valeurs mesurées doivent être transmises sur de longues distances entre le codeur et l'unité d'évaluation. La transmission des données (horloge et données) s'effectue via quatre lignes, deux paires de signaux étant transmises à chaque fois (transmission de signaux symétriques en phase et tournés de 180° en phase). Si des signaux d'une paire de signaux sont superposés par une perturbation sur la voie de transmission entre l'esclave et le maître, cette perturbation peut être éliminée par formation de la différence des deux paires de signaux dans l'unité d'évaluation. Pour une transmission fiable des signaux de mesure sur de longues distances, les câbles de signaux à paires torsadées avec des paires de lignes blindées individuellement sont particulièrement adaptés. Pour plus d'informations sur la communication SSI avec les codeurs MEGATRON, veuillez nous contacter.
Concept de dépannage par SSI
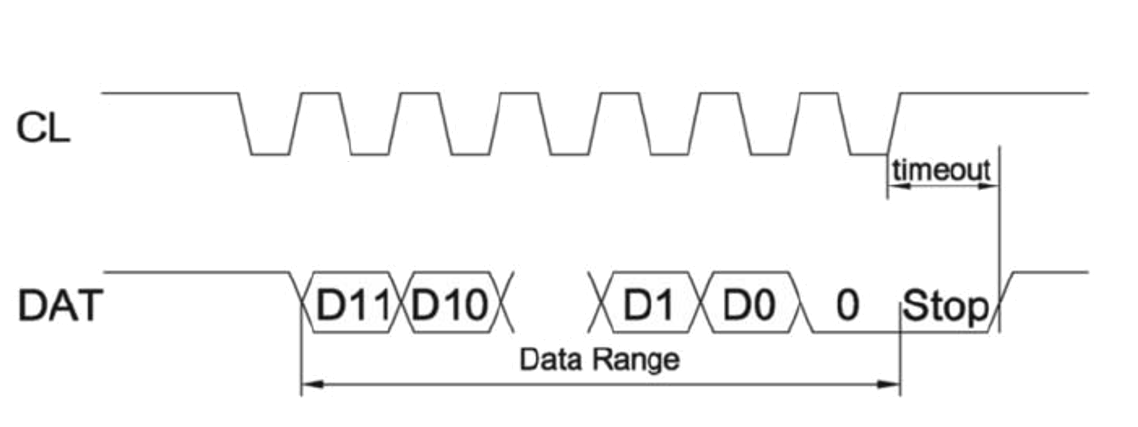
Transmission de données sur les deux canaux Clock et Data










Les codeurs absolus sont des capteurs rotatifs qui mesurent les positions angulaires dans une application, convertissent ces informations angulaires en signaux électriques et les émettent sous forme d'une valeur absolue. Les technologies de capteurs magnétiques à effet Hall fournissent d'excellents résultats de mesure, avec les avantages bien connus du principe de mesure sans contact et de la durée de vie quasi illimitée des capteurs.
Grâce au grand choix de signaux de sortie électriques, de raccordements et de designs mécaniques, une saisie de valeurs de mesure fiable, reproductible et exacte est disponible pour presque toutes les applications. La plage de mesure angulaire d'un codeur absolu est d'une importance capitale. Les capteurs rotatifs monotour couvrent des plages angulaires allant jusqu'à 360 degrés et les capteurs rotatifs multitours des angles supérieurs. Il convient de mentionner en particulier la possibilité de programmer une courbe de sortie spécifique au client pour les valeurs absolues.
En tenant compte de tous les paramètres possibles, nous élaborons la meilleure solution produit possible dans le cadre de nos conseils. En effet, dans les applications exigeantes, il est souvent nécessaire de procéder à une adaptation technique du produit. MEGATRON est votre spécialiste pour ces cas et vous soutient de la demande à la réalisation jusqu'à la production en série et au-delà jusqu'à la "fin de vie" de votre application avec des produits de qualité assurée et une grande fiabilité de livraison en tant que partenaire fiable à long terme.