 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Codeur incrémental
Capteurs rotatifs optiques et magnétiques avec sortie incrémentale
Guide codeur incrémental
Contenu
Qu'est-ce qu'un codeur incrémental ?
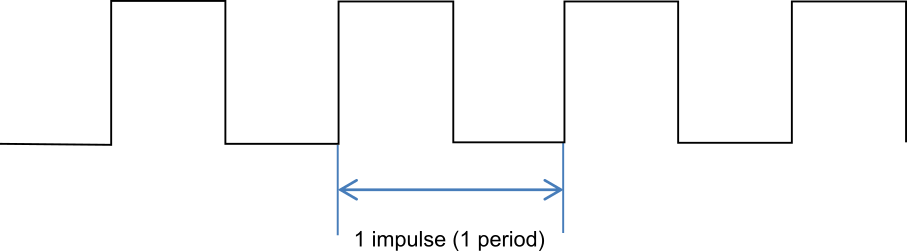
Les codeurs incrémentaux sont des capteurs rotatifs qui émettent leur signal de sortie sous forme d'impulsions. Une impulsion correspond à une durée de période, l'incrément, d'où le nom de ce type de codeur. Les codeurs incrémentaux sont également appelés codeurs à impulsions rotatives en raison de leurs caractéristiques de codeurs pour mouvements rotatifs et de la forme de leur signal. L'utilisation d'impulsions pour la mesure est un principe fondamentalement différent de celui des potentiomètres et des codeurs absolus, par exemple. La caractéristique la plus importante pour déterminer la précision angulaire d'un codeur incrémental est le nombre d'impulsions générées à la sortie pour chaque tour complet de l'arbre (impulsions par tour, Imp./Udr.). Cette valeur se trouve dans chaque fiche technique d'un codeur incrémental.

Pour évaluer les signaux des codeurs incrémentaux, il faut toujours une unité d'évaluation externe, comme par exemple un compteur.
- Si l'angle doit être saisi, les informations provenant des incréments doivent être évaluées. Si le codeur incrémental fournit par exemple 360 impulsions/tr/min, alors 1° correspond exactement à une impulsion.
- Pour une mesure de la vitesse angulaire (variation angulaire par unité de temps), le nombre d'impulsions par unité de temps est calculé.
D'une manière générale, il faut tenir compte de certaines choses lors de l'évaluation des signaux, voir à ce sujet l 'évaluation des signaux incrémentaux.
Principes de fonctionnement
Il existe différents principes de détection qui sont utilisés pour réaliser techniquement un codeur incrémental. La technologie la plus répandue est sans doute la détection optoélectronique, utilisée pour les codeurs optiques. Les principes de mesure magnétiques constituent une autre possibilité. Les "capteurs rotatifs à effet Hall" sont également proposés avec des sorties incrémentales. MEGATRON utilise exclusivement des capteurs à effet Hall modernes basés sur le gradient.
Codeurs incrémentaux optiques
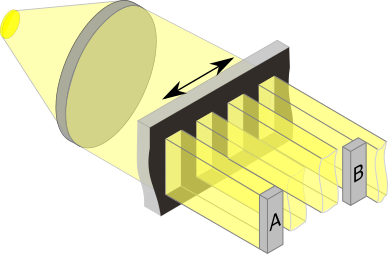
L'illustration montre de manière très simplifiée le principe de mesure par imagerie d'un codeur optique. Les deux détecteurs A et B sont éclairés de manière décalée dans l'espace pendant la rotation de la roue codeuse (en noir), ce qui génère des impulsions.
La technologie des capteurs optiques présente plusieurs avantages qui font des codeurs optiques les plus importants des codeurs incrémentaux. Tout d'abord, le fait que la méthode de mesure des éléments de détection intégrés génère elle-même des incréments, ce qui rend son utilisation dans les codeurs incrémentaux évidente. Vous trouverez ici un aperçu des codeurs optiques.
Le système optique d'un codeur incrémental optique moderne se compose au minimum des éléments suivants :
- une diode électroluminescente (LED) qui produit de la lumière
- d'un collimateur, qui oriente la lumière de la LED en parallèle
- Une roue codeuse, qui présente alternativement des zones transparentes et non transparentes (ou réfléchissantes et absorbantes)
- Le photodétecteur, qui détecte la lumière incidente de la LED et la convertit en un signal électrique.
Deux procédés se sont établis sur le marché : Le procédé transmissif (imageur) et le procédé réflecteur (interférentiel). Dans le procédé transmissif, la roue codeuse est éclairée par transparence, alors que dans le procédé réflectif, le faisceau lumineux est renvoyé (réfléchi) par la surface de la roue codeuse et les effets d'interférence sont utilisés.
Brève explication du procédé transmissif :
La lumière est collimatée (parallélisée) et passe par la roue codeuse. La roue assure que les zones claires et sombres se rencontrent alternativement sur les détecteurs de manière périodique. Le signal des deux photodétecteurs est généralement déphasé de 90°. Ainsi, la succession des signaux ou leur écart dans le signal de sortie permet de déterminer le sens de rotation. La structure varie en fonction des exigences. Des éléments supplémentaires dans la structure du capteur génèrent par exemple une impulsion de référence qui ne produit un signal sur un troisième canal qu'une fois par rotation. Cette référence permet de calculer l'angle absolu. C'est-à-dire qu'à partir de la référence, le nombre d'impulsions est compté. Si la valeur du compteur est perdue en raison d'une interruption de l'alimentation électrique, une course de référence permet de rétablir l'information sur l'angle absolu.
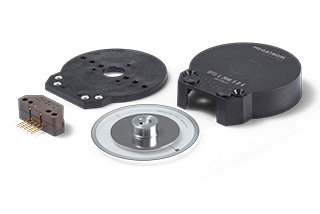
Roues codeuses pour codeurs optiques
Les roues codeuses sont fabriquées dans différents matériaux, généralement en métal, en verre ou en plastique. Pour les codeurs bon marché, le plastique est le plus souvent utilisé. Les roues codeuses en métal sont très robustes. Si l'on compare le métal au verre ou au plastique, on constate qu'à diamètre identique, le métal ne permet pas d'obtenir des résolutions optiques aussi élevées en mode transmissif. Avec le procédé réflectif, la structure incrémentale est imprimée sur la roue codeuse et il est possible de réaliser des structures plus fines.
Codeur incrémental à effet Hall
Les capteurs rotatifs à effet Hall sont également disponibles avec des sorties incrémentales. Comme pour les codeurs optiques, la technique de mesure est sans contact et n'est donc guère affectée par l'usure (à l'exception du roulement). Les avantages des codeurs incrémentaux à effet Hall se trouvent surtout dans la durée de vie pratiquement illimitée des capteurs (pas de vieillissement des diodes électroluminescentes) et dans l'excellente résistance aux chocs. Un inconvénient peut être la sensibilité aux champs parasites extérieurs et le fait que les signaux sont transmis avec un certain retard (taux de mise à jour). Pour une explication du principe de mesure des codeurs à effet Hall, voir ainsi le guide Codeurs absolus. Pour une analyse plus détaillée des avantages et des inconvénients des différentes technologies de codeurs, voir le guide Codeurs.
Evaluation de signaux incrémentaux
Canaux, résolution et sens de rotation
Les codeurs incrémentaux ont généralement plusieurs sorties de signal. Si un codeur incrémental émet plusieurs paquets de signaux, on utilise dans ce contexte le terme de canal ou, en anglais, channel. Par exemple "canal A" et "canal B". Dans la littérature, on utilise également le terme "piste" ou "track" en anglais à la place du terme "canal".
Exemple : Si la fiche technique d'un codeur incrémental indique la valeur 360 Imp./Udr. et que le codeur possède les sorties de signaux électriques "A" et "B" ("canal A" et "canal B"), 360 impulsions par tour de l'arbre (par 360°) sont émises à la sortie "A" et, également à la sortie "B", 360 Imp./Udr. supplémentaires à 90° en avance ou en retard sur les impulsions du canal A. Au total, le capteur rotatif génère donc pour les deux canaux A et B 720 impulsions/tr/min par tour complet de l'arbre (360°).
Le terme de résolution est également utilisé pour désigner le nombre d'impulsions par tour (Imp./Udr.). Plus cette valeur est élevée (Imp./Udr.), plus la résolution angulaire du codeur est élevée.
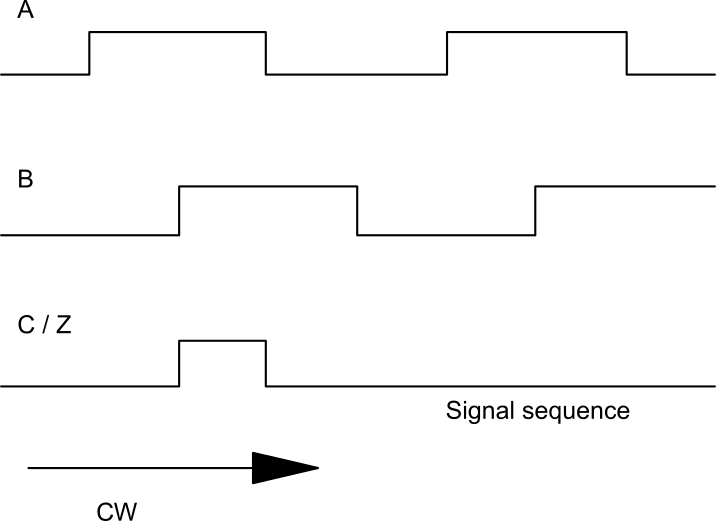
Les signaux rectangulaires du "canal B" sont soit en avance de 90°, soit en retard de 90° sur les signaux du "canal A". Le fait que le signal du "canal A" du "canal B" soit en avance de 90° ou en retard de 90° dépend du produit et est indiqué dans la fiche technique. La plupart du temps, on y trouve une illustration de la fonction de sortie du signal en relation avec l'indication du sens de rotation, dans laquelle la séquence des signaux des canaux est représentée.
Exemple : Dans l'illustration ci-contre, le sens de rotation défini est CW (CW=ClockWise). Si le codeur est vu de face (l'extrémité de l'arbre du codeur angulaire est tournée vers l'observateur) et que l'arbre du codeur est tourné dans le sens des aiguilles d'une montre, la sortie du signal du "canal B" est en retard de 90° sur la sortie du signal du "canal A". En revanche, si l'arbre est tourné dans le sens inverse des aiguilles d'une montre, le signal du "canal B" est en avance de 90° par rapport au signal du "canal A".
Cette relation peut être utilisée dans une unité d'évaluation pour la détection du sens de rotation. Le nombre d'impulsions, la longueur d'impulsion et la durée de période de la voie A et de la voie B sont identiques. Lors du remplacement d'un codeur par un autre modèle, ces caractéristiques sont déterminantes, car la programmation de l'unité d'évaluation ne doit pas être modifiée si les séquences de signaux des produits à échanger sont identiques.
Piste Z / signal d'index
Souvent, une autre piste peut être sélectionnée en option, la piste d'index ou "piste Z". A la sortie de la piste Z, un signal d'index est émis à chaque tour complet de l'arbre (360°) sous la forme d'une seule impulsion carrée.
Le signal d'index a essentiellement deux fonctions :
- Comme référence de point zéro: après une absence de tension, l'impulsion d'index permet d'atteindre un point zéro défini.
- Comme impulsion de référence: en particulier pour les capteurs rotatifs qui fonctionnent avec des vitesses d'actionnement très élevées, l'impulsion de référence a une fonction de contrôle en tant qu'impulsion de comptage séparée pour un actionnement / un tour complet.
Exemple de cas : un contrôle est effectué pour vérifier si, entre deux impulsions d'index successives, le nombre d'impulsions comptées "normales" correspond à celui auquel on peut s'attendre. Si, par exemple, un codeur angulaire avec la spécification 16000 impulsions / tours est utilisé et que l'unité d'évaluation compte moins de 16000 impulsions par tour complet, il y a alors une erreur.
Evaluation des flancs / signal en quadrature
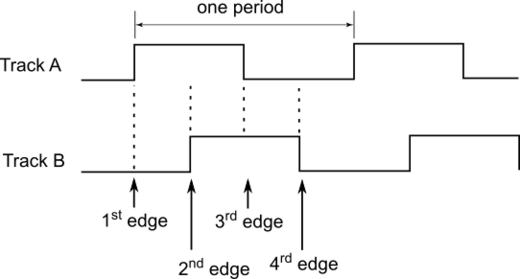
Le décalage de 90° des signaux rectangulaires des canaux A et B présente un avantage. Pour chaque piste et période de signal, un signal rectangulaire possède un flanc de signal croissant et un flanc de signal décroissant. L'ordre des fronts pour les pistes A et B d'une période de signal est le suivant :
Front montant de la piste A (1) → après une ¼ période Front montant de la piste B (2) → après une ½ période Front descendant de la piste A (3) → après une ¾ période Front descendant de la piste B (4).
Si l'on évalue dans une unité d'évaluation non seulement le front montant d'une piste, mais aussi les fronts montants et descendants des deux pistes A et B, ce procédé permet de quadrupler le nombre d'impulsions. Cela correspond à une augmentation de la précision d'un facteur quatre, sans rien changer à la construction du codeur.
Exemple : Si la fiche technique du codeur incrémental indique une résolution de 1024 impulsions/tour, celle-ci serait quatre fois plus élevée en cas d'évaluation des flancs, ce qui correspond à 4096 signaux par tour et par canal. L'évaluation des flancs qui vient d'être décrite est également appelée "signal en quadrature avec information de direction". Une évaluation des flancs peut par exemple être réalisée sur la base du circuit intégré LS7083 proposé par MEGATRON.
Vitesse maximale et fréquence de coupure
Les codeurs incrémentaux ne peuvent pas être utilisés à n'importe quelle vitesse. Il existe des limitations mécaniques et/ou électroniques :
Les limitations mécaniques peuvent être déterminées à partir de la fiche technique et ont les causes suivantes :
- Vitesse max. Vitesse du palier d'arbre (valable uniquement pour les codeurs avec leur propre palier d'arbre, voir Shaft Encoder). Ici, la vitesse d'actionnement maximale autorisée est souvent inférieure à 10000 tr/min.
- L'excentricité (déséquilibre) du mécanisme. Dans le cas des codeurs optiques, celle-ci est notamment causée par le déséquilibre de la roue codeuse. La vitesse d'actionnement maximale peut toutefois atteindre 60.000 tours/minute. Cette limitation n'existe généralement pas pour les codeurs magnétiques en kit.
La limitation électronique peut être calculée. Le résultat du calcul est la "vitesse d'actionnement maximale théoriquement possible".
- La cause réside dans la fréquence limite de l'électronique. Une fréquence supérieure à la fréquence limite ne peut pas être traitée par l'électronique. Plus la fréquence limite est élevée et plus la résolution du codeur est faible, plus la vitesse d'actionnement théoriquement possible est élevée. La formule suivante peut être utilisée pour calculer la vitesse d'actionnement théorique maximale à partir de la fréquence limite :
\(max. rpm =\frac{\text {cut-off frequency} \frac {1} {s} * 60 }{ \text {number of pulses}}\)
Deux exemples de calcul de la vitesse d'actionnement maximale théorique sont présentés ci-dessous.
Exemple 1 : On souhaite une résolution de 512 imp./Udr. La fréquence limite du codeur est indiquée à 100 kHz. On obtient
\({100000 \cdot 1/s\cdot 60 \text{ s} \over 512} = 11718 \text { rpm} \)
Résultat : La vitesse d'actionnement théorique maximale autorisée est de 11718 tr/min.
Exemple 2 : On souhaite une résolution de 10000 imp./tr. La fréquence limite du codeur est indiquée par 100 kHz. Résultat : La vitesse d'actionnement maximale théorique est de 600 Udr./min.
\({100000 \cdot 1/s \cdot 60 \text{ s} \over 10000} = 600 \text { rpm} \)
Une comparaison entre la vitesse d'actionnement maximale théorique et la vitesse d'actionnement mécaniquement admissible montre laquelle compte pour l'application : La plus faible des deux valeurs est pertinente !
Tolérances et écarts des codeurs incrémentaux optiques
Aucun codeur incrémental ne fournit des signaux parfaits. Pour les codeurs incrémentaux optiques, les incertitudes ou tolérances à respecter pour les signaux de ces codeurs sont décrites ci-dessous. Le système optique comprend la roue codeuse elle-même ainsi que le module du codeur ou le sous-ensemble contenant la LED et le photodétecteur. Tous les éléments interagissent pour produire un certain écart par rapport à la forme rectangulaire idéale du signal et à la position idéale des flancs. Ces relations de tolérance sont décrites dans la fiche technique d'un codeur optique incrémentiel et aident l'utilisateur à effectuer une analyse plus précise des données de mesure. La plupart du temps, elles sont représentées sous la forme d'une image des signaux des canaux A, B et, le cas échéant, Z. En s'appuyant sur l'image ci-contre, les relations sont ensuite expliquées à l'aide d'exemples.
Les symboles ont la signification suivante :
C correspond à une période de signal P représente une ½ période de signal S représente une ¼ période de signal Ф est la référence de phase entre les canaux A et B.
Dans le cas idéal, on a donc C = 2 * P = 4 * S = S1 + S2 + S3 + S4.
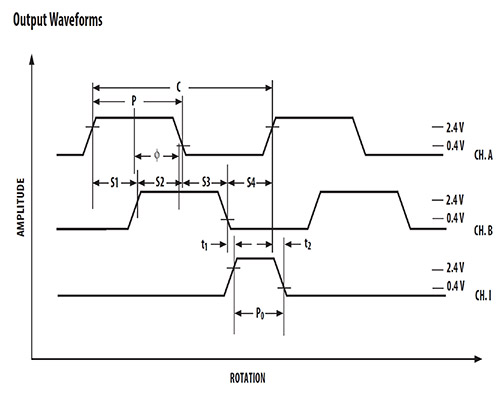
Exemple de description de la zone de tolérance d'une durée de période d'un quart Un incrément, et donc une durée de période, se compose idéalement de quatre parts de signal équidistantes (C/4). Comme, dans la pratique, une période de signal ne se divise pas en quatre parts égales, le rapport possible et donc la bande de tolérance des quatre parts d'une période de signal (T) entre elles est décrit. Le terme suivant décrit qu'un quart de la période de signal peut varier d'un douzième de la période de signal :
\(S1,S2,S3,S4 = \frac {C} {4} \pm \frac {C} {12}\)
Exemple de description du champ de tolérance d'une demi-période
Dans le cas idéal, un incrément et donc une période de signal se composent de deux parties de signal équidistantes (C/2). Comme une période de signal ne se compose pas toujours exactement de deux paires d'ondes de même longueur, le rapport possible entre les deux paires d'ondes d'une période de signal (T) est décrit. Le terme suivant décrit qu'une demi-durée de période, ou une demi-période de signal, ou une demi-longueur d'onde peut varier de plus ou moins un douzième par rapport à l'idéal.
\(P = \frac {C} {2} \pm \frac {C} {12}\)
Description du déphasage possible entre les canaux A et B Dans le cas idéal, le déphasage entre les canaux A et B est exactement de 90° (quatre-vingt-dix degrés). Les 90° sont représentés dans la relation C/4. Donc un quart d'une période de signal correspond à 90°. Dans ce cas, l'erreur peut être de ± C/24, soit plus ou moins un vingt-quatrième. Un vingt-quatrième correspond à 360°/24, ce qui correspond à une erreur de phase possible de plus ou moins 15°. Ainsi, la relation des incréments entre les canaux A et B peut se situer dans une plage de 90° ±15° et la référence de phase entre les canaux A et B peut se situer dans une plage de 75°...105°.
\(Ф = \frac {C} {4} \pm \frac {C} {24}\)
Description de la bande de tolérance de la longueur de l'impulsion d'index (canal Z) L'impulsion d'index est émise une fois tous les 360° lorsque l'arbre est actionné en continu dans une direction. Une durée de période correspond à C. La représentation C/4 signifie que l'impulsion d'index correspond idéalement à ¼ de la longueur d'une période de signal. La largeur d'impulsion de l'impulsion d'index peut s'écarter de l'idéal, c'est-à-dire de la longueur d'un quart de période de signal (=C/4), de plus ou moins un douzième d'une période de signal.
Cela signifie que la largeur d'impulsion de l'impulsion d'index peut varier entre 1/3 (=C/3) et 1/6 (=C/6) d'une période de signal.
\(Po = \frac {C} {4} \pm \frac {C} {12}\)
Interpolation sinus-cosinus
Plus le nombre d'impulsions réalisées par tour sur un codeur optique est élevé, plus la largeur de trait des incréments sur la roue codeuse est faible. Le système optique d'un codeur angulaire n'est toutefois en mesure de saisir des incréments que jusqu'à une certaine largeur de trait. Par exemple, une roue codeuse de 10 mm de diamètre ne peut pas recevoir 10 000 traits en raison de sa petite taille. Si l'on veut réaliser un codeur incrémental avec un petit diamètre de boîtier et une résolution élevée, on se base souvent sur une interpolation sinus/cosinus.
Dans ce procédé, le système optique du codeur n'est pas utilisé comme dans le cas d'un codeur optique incrémental conventionnel, de sorte qu'il se produit des changements d'état abrupts entre la transmission et une interruption de la transmission, respectivement de la réflexion, une interruption de la réflexion. Au lieu de cela, on réalise une transition aussi douce que possible entre aucune transmission et une transmission ou une réflexion maximale. La transition continue conduit à une fonction sinusoïdale du signal. Pour réaliser un deuxième canal qui génère un signal cosinus, une autre LED et un phototransistor sont nécessaires. Les signaux sinus et cosinus sont ensuite numérisés. En règle générale, on utilise ici un taux d'échantillonnage continu.
Exemple : en utilisant une roue codeuse à partir de laquelle on obtient 8 périodes sinusoïdales, cela correspond à une résolution de 3 bits. Mais si l'on échantillonne ce signal sinusoïdal à 10 bits, on obtient une résolution (de numérisation) de213 bits, ce qui correspond à une résolution de 8192 impulsions/tour. L'avantage de ce principe est donc évident.
Il existe également des codeurs optiques et magnétiques avec sortie analogique, qui fournissent des signaux analogiques sinusoïdaux et cosinusoïdaux. Une interpolation en aval est possible à l'aide d'un tel codeur.
Interfaces de sortie
En raison de leurs caractéristiques (haut-bas, marche-arrêt, logique booléenne), les signaux incrémentaux sont particulièrement bien adaptés pour travailler avec des circuits numériques. De nombreuses séries de codeurs incrémentaux proposent donc des interfaces qui permettent de les intégrer facilement dans de tels réseaux de circuits :
- OC (collecteur ouvert)
- sortie de tension standard ou TTL (logique transistor-transistor)
- PP (Push Pull)
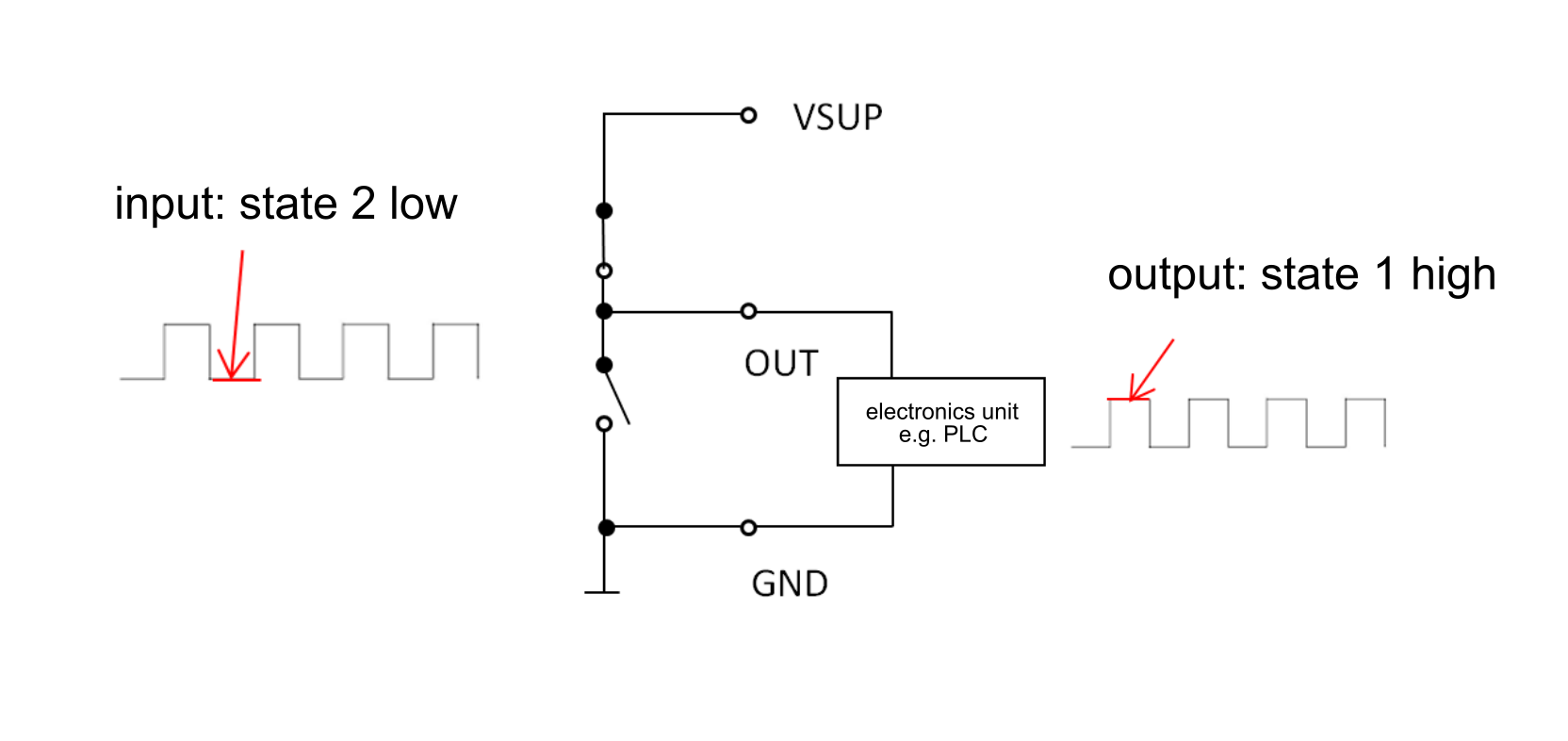
Sortie Open Collector (OC)
Le circuit à collecteur ouvert est un standard évident pour les circuits de sortie des signaux incrémentaux. Son grand avantage est de permettre le raccordement de la sortie à un autre niveau de tension défini par l'application. Cela est possible parce qu'aucune résistance pull-up n'est intégrée dans le capteur rotatif et que le collecteur sort du boîtier sans autre câblage (collecteur ouvert). Le transistor fait donc office d'interrupteur.
L'exemple suivant s'applique à un transistor bipolaire Si-NPN :
Niveau haut à la sortie du signal :
- En cas de niveau bas (<0,7 V) à la base du transistor, celui-ci se bloque et la tension d'alimentation (VSUP) est appliquée au collecteur.
Niveau bas à la sortie du signal :
- En cas de niveau haut (>0,7 V) à la base du transistor, la tension au collecteur (VSUP) est tirée vers la masse.
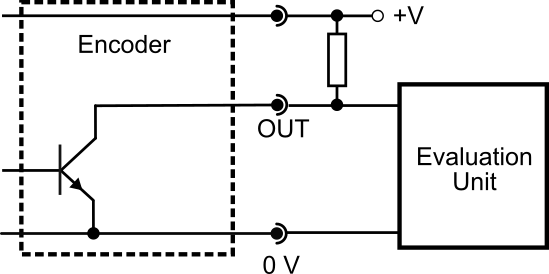
Dans le cas du circuit Open Collector, il est généralement nécessaire de placer une résistance Pull-Up entre la tension d'alimentation et les sorties de signal A, B et Z du codeur (collecteur). Cela garantit que les niveaux peuvent être détectés par l'unité de contrôle en tant que niveaux bas et hauts. Une valeur typique pour une résistance pull-up peut être de 4,7 kohms. La tension maximale du collecteur dépend du transistor utilisé et est généralement indiquée dans la fiche technique du codeur. Comme elle est dans certains cas supérieure à 50 V, des signaux incrémentaux avec un niveau de signal très élevé peuvent être transmis sur de grandes distances de ligne. La variabilité de la valeur de la tension du collecteur permet également une conversion de niveau.
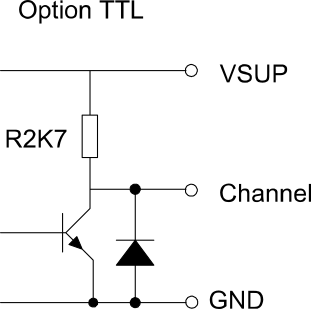
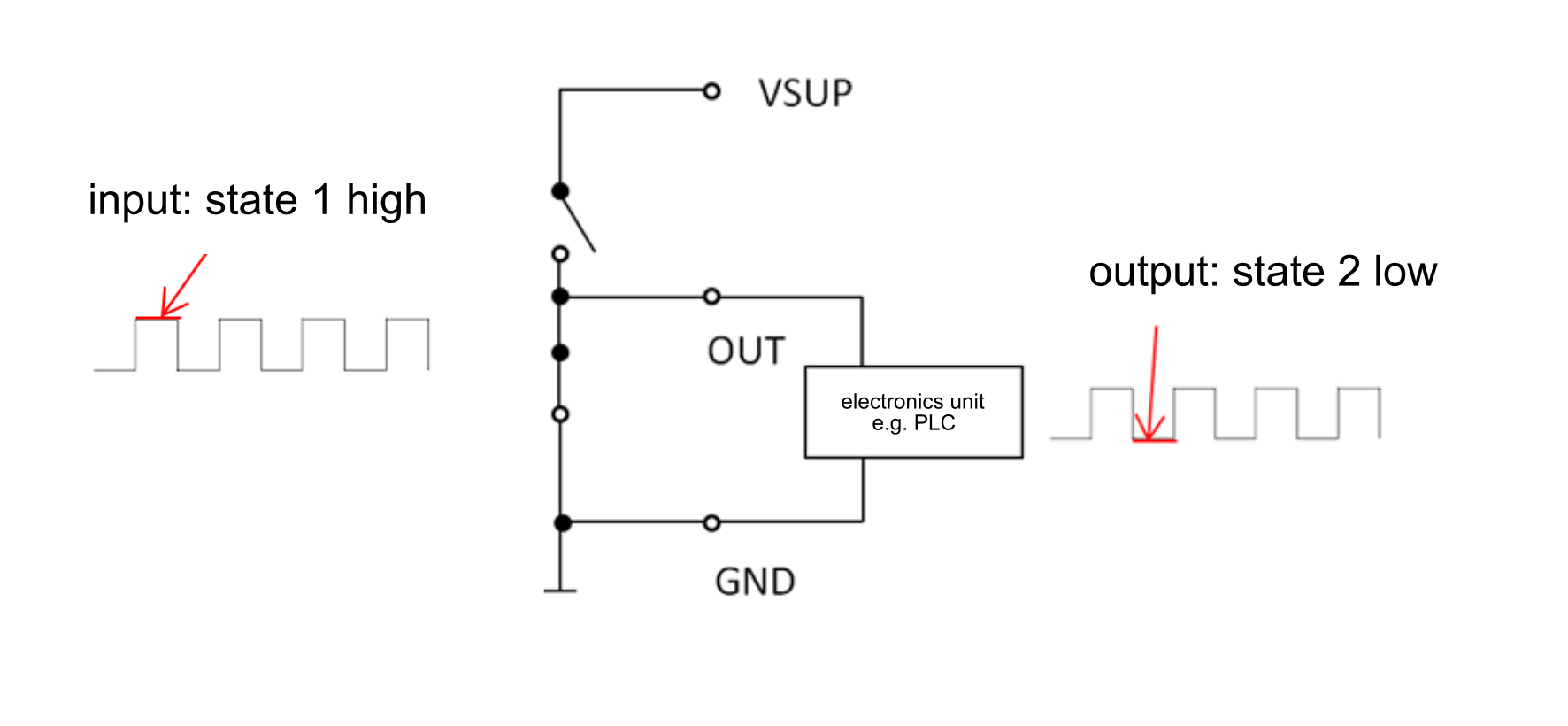
Sortie TTL
La sortie TTL est souvent appelée simplement sortie de tension (en anglais "voltage output"). La différence par rapport à la sortie Open Collector est que les résistances Pull-Up nécessaires sont déjà intégrées dans le boîtier du codeur et que les niveaux sont donc fixes. Une conversion de niveau variable comme dans le cas du circuit Open Collector n'est donc pas possible.
Ces niveaux pour la logique TTL standard sont : < 0,4 V pour le niveau bas > 2,4 V pour le niveau haut
sortie push / pull
Le circuit de sortie push / pull est basé sur une paire de transistors complémentaires (canal n et canal p). L'un des deux transistors est alternativement bloqué.
Pendant le niveau haut du signal de sortie, celui-ci se trouve au niveau de VSUP et dans l'état bas, il se trouve à peu près à la masse. L'avantage d'un circuit push / pull est qu'il ne nécessite pas de résistances pull-up ou pull-down supplémentaires. Si aucune conversion de niveau n'est nécessaire, les codeurs avec circuit de sortie push / pull peuvent être utilisés comme remplacement universel des sorties à collecteur ouvert et des sorties TTL / tension.
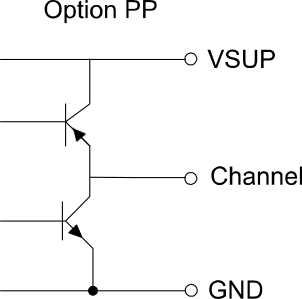
Niveau bas sur les entrées de transistor : NPN bloque et PNP ouvre Le niveau haut est VSUP
Niveau haut aux entrées des transistors : NPN ouvre et PNP bloque Niveau bas proche de la masse





















Les codeurs incrémentaux sont utilisés partout où des angles, des vitesses de rotation ou des vitesses angulaires doivent être saisis avec une grande précision. Les codeurs incrémentaux fournissent des signaux de sortie sous forme d'impulsions qui sont comptées par une unité de traitement externe. Pour les produits de haute qualité utilisés par MEGATRON, les capteurs eux-mêmes sont basés sur des principes de mesure sans contact tels que les capteurs optoélectroniques et magnétiques (à effet Hall).
En principe, on peut retenir que les codeurs incrémentaux optiques sont insensibles aux champs parasites externes et offrent la plus grande précision lors des opérations de positionnement ou de réglage. Les codeurs magnétiques ont une durée de vie extrêmement longue et sont très résistants aux vibrations. Grâce à la grande variété de designs et d'options de sortie que nous proposons, vous trouverez dans notre portefeuille un codeur incrémental parfaitement adapté à presque toutes les applications.
Cependant, les applications spéciales nécessitent souvent une adaptation technique que nous réalisons chez MEGATRON, même pour des quantités relativement faibles. Notre objectif est de proposer à chaque client le meilleur produit fonctionnel et économique pour son application. De la demande d'offre à la fin du cycle de vie du produit, en passant par la production en série, nous vous soutenons en tant que partenaire fiable avec une grande fiabilité de livraison et une assurance qualité.