 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Codificadores incrementais
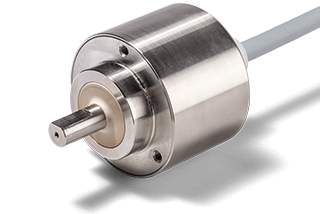
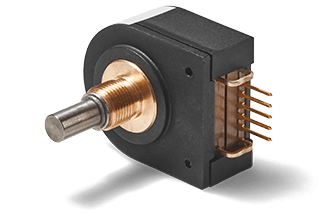
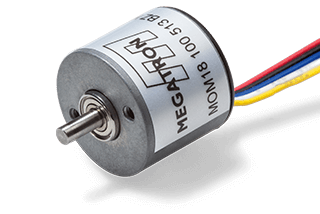
Encoders ópticos e magnéticos com saída incremental
Encoders incrementais de guia
Índice
O que é um codificador incremental?
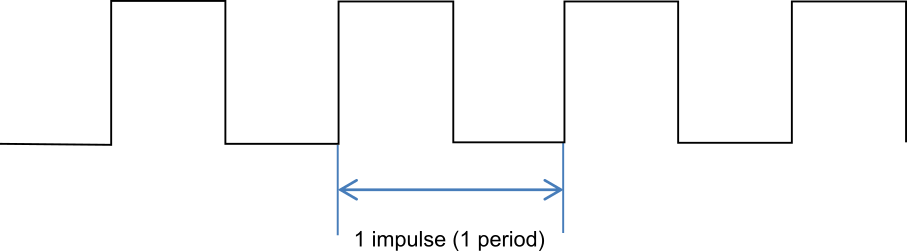
Os encoders incrementais são encoders rotativos que fornecem um sinal de saída sob a forma de impulsos. Um impulso corresponde a um período, o incremento, que dá nome a este tipo de encoder. Os encoders incrementais são também designados por encoders de impulsos rotativos devido às suas caraterísticas como encoders para movimentos rotativos e à sua forma de sinal. A utilização de impulsos para medição é um princípio fundamentalmente diferente de, por exemplo, potenciómetros e encoders absolutos.
A propriedade mais importante para determinar a precisão angular de um encoder incremental é o número de impulsos gerados por rotação completa do eixo na saída (impulsos por rotação, ppr.). Este valor pode ser encontrado em qualquer folha de dados de um encoder incremental.

Para avaliar os sinais dos encoders incrementais, é sempre necessária uma unidade de avaliação externa, como, por exemplo, um contador.
- Se o ângulo tiver de ser registado, o número de impulsos tem de ser contado por uma unidade de avaliação. Se o ângulo tiver de ser registado, a informação dos incrementos tem de ser avaliada. Por exemplo, se o encoder incremental fornecer 360 ppr, então 1° corresponde exatamente a um impulso.
- Para uma medição da velocidade angular (alteração do ângulo por unidade de tempo), calcula-se o número de impulsos por unidade de tempo
Em geral, há algumas coisas a considerar ao avaliar os sinais, ver Avaliação de sinais incrementais.
Princípios de funcionamento
Existem vários princípios de sensor que podem ser utilizados para implementar encoders incrementais. O mais comum é provavelmente a deteção optoelectrónica, que é utilizada nos encoders ópticos. Outra possibilidade é a deteção magnética. Os encoders Hall também estão disponíveis com saídas incrementais. A MEGATRON utiliza apenas sensores Hall modernos baseados em gradientes.
Codificadores ópticos incrementais
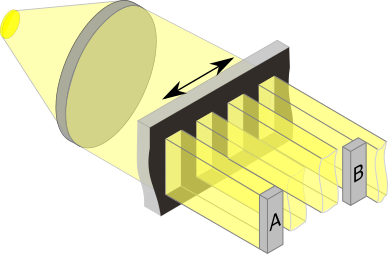
A figura mostra uma ilustração simplificada do princípio de medição por imagem de um codificador ótico. Os dois detectores A e B são iluminados com um desvio espacial durante a rotação da roda de codificação (preto), gerando impulsos.
A tecnologia de sensores ópticos tem várias vantagens que fazem dos encoders ópticos os encoders incrementais mais importantes. Em primeiro lugar, o facto de o próprio método de medição dos elementos sensores integrados gerar incrementos, pelo que a utilização em encoders incrementais é óbvia. Uma visão geral dos encoders ópticos pode ser encontrada aqui.
O sistema ótico de um encoder incremental ótico moderno é constituído, no mínimo, pelos seguintes componentes:
- Um díodo emissor de luz (LED) que produz luz
- Um colimador que direciona a luz do LED em paralelo
- Uma roda de codificação com regiões alternadamente permeáveis e não permeáveis (ou reflectoras e absorventes)
- O fotodetector, que detecta a luz incidente do LED e a converte num sinal elétrico.
Existem dois métodos estabelecidos no mercado: O método transmissivo (imagem) e o método refletivo (interferencial). No método transmissivo, a roda de codificação é transiluminada, enquanto no método refletivo, o feixe de luz é refletido a partir da superfície da roda de codificação e são utilizados efeitos de interferência.
Uma breve explicação do método transmissivo:
A luz é colimada (paralelizada) e passada através da roda de codificação. A roda assegura que as áreas claras e escuras dos detectores se alternam periodicamente. O sinal dos dois fotodetectores está normalmente 90° desfasado. Consequentemente, o sentido de rotação pode ser determinado a partir da sequência dos sinais ou do seu espaçamento no sinal de saída.
A estrutura varia de acordo com os requisitos. Por exemplo, elementos adicionais na conceção do sensor geram um impulso de referência que só gera um sinal num terceiro canal uma vez por rotação. Esta referência permite o cálculo do ângulo absoluto. Isto significa que o número de impulsos é contado a partir da referência. Se a contagem se perder devido a uma interrupção de energia, o ângulo de referência pode ser utilizado para recuperar a informação do ângulo absoluto.
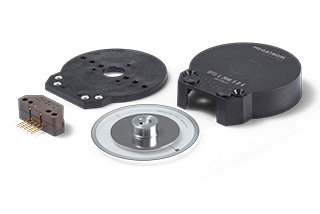
Rodas de codificação para codificadores ópticos
As rodas codificadoras são feitas de uma variedade de materiais, normalmente metal, vidro ou plástico. O plástico é utilizado principalmente para codificadores de baixo custo. Os rolos de codificação em metal são muito robustos. Comparando o metal com o vidro ou o plástico, não é possível obter resoluções ópticas tão elevadas com o mesmo diâmetro utilizando o método transmissivo. Com o método refletivo, a estrutura incremental é impressa na roda de codificação e é possível obter estruturas mais finas.
Codificadores incrementais de efeito Hall
Os encoders Hall também estão disponíveis com saídas incrementais. Tal como acontece com os encoders ópticos, a tecnologia de medição não tem contacto e, por isso, é praticamente isenta de desgaste (à exceção da chumaceira). As principais vantagens dos encoders incrementais de efeito Hall são a vida útil praticamente ilimitada da tecnologia de sensores (sem envelhecimento dos LEDs) e a excelente resistência ao choque. As desvantagens podem ser a sensibilidade a interferências externas e o facto de os sinais serem transmitidos com um ligeiro atraso de tempo (taxa de atualização). Para uma explicação do princípio de medição dos encoders de efeito Hall, ver o guia dos encoders absolutos. Para uma análise mais detalhada das vantagens e desvantagens das diferentes tecnologias de encoders, ver o guia de encoders rotativos.
Avaliação do sinal de sinais incrementais
Canais, resolução e direção de rotação
Os encoders incrementais têm normalmente várias saídas de sinal. Se um encoder incremental emitir vários pacotes de sinais, o termo canal é utilizado neste contexto. Por exemplo, "Canal A" e "Canal B". Na literatura, o termo "pista" também é utilizado em vez de "canal".
Exemplo:
Se a folha de dados de um codificador incremental especificar o valor 360 ppr e o codificador tiver as saídas de sinal elétrico "A" e "B" ("Canal A" e "Canal B"), então 360 impulsos por uma rotação do veio (por 360°) são emitidos na saída "A" e outros 360 ppr 90° à frente ou atrás dos impulsos do canal A são emitidos na saída "B". No total, o codificador gera 720 ppr por rotação completa do eixo (360°) para ambos os canais A e B.
O número de impulsos por rotação (ppr) é também referido como a resolução, quanto maior for o valor ppr), maior será a resolução angular do codificador.
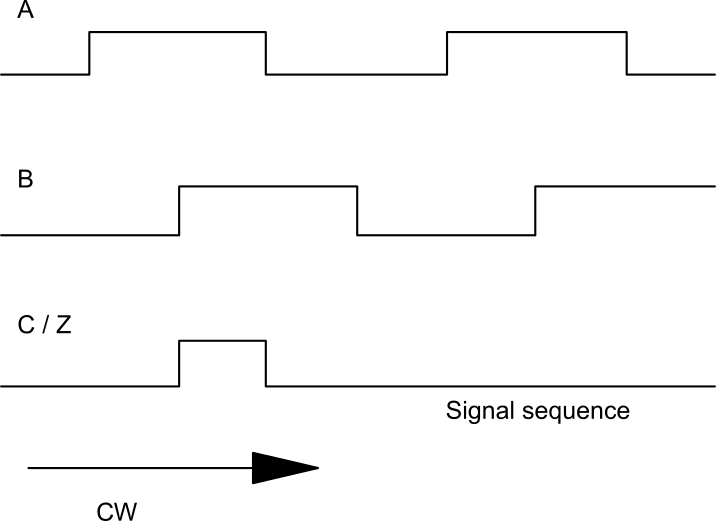
Os sinais de onda quadrada do "Canal B" estão 90° à frente ou 90° atrás dos sinais do "Canal A". O facto de o sinal do "Canal A" estar 90° à frente ou 90° atrás do sinal do "Canal B" depende do produto e é especificado na folha de dados. Na maioria dos casos, existe uma ilustração da função de saída de sinal em conjunto com a indicação do sentido de rotação, mostrando a sequência de sinais dos canais.
Exemplo:
Na ilustração à direita, CW (sentido horário) é definido como o sentido de rotação. Quando o codificador é visto de frente (com a extremidade do eixo do codificador virada para o observador) e o eixo do codificador é rodado no sentido dos ponteiros do relógio, a saída do sinal do "Canal B" é atrasada 90° em relação à saída do "Canal A". No entanto, se o eixo for rodado no sentido contrário ao dos ponteiros do relógio, o sinal do "Canal B" estará 90° à frente do sinal do "Canal A".
Esta relação pode ser utilizada numa unidade de avaliação para detetar o sentido de rotação. O número de impulsos, a duração dos impulsos e o período da via A e da via B são idênticos. Ao trocar um encoder por outro modelo, estas caraterísticas são decisivas, uma vez que a programação da unidade de avaliação não precisa de ser alterada se as sequências de sinais dos produtos a trocar forem idênticas.
Via Z / Sinal de índice
Muitas vezes, pode ser selecionada uma via adicional como opção, a chamada via de índice ou "via Z". A saída da via Z fornece um sinal de índice sob a forma de um único impulso quadrado para cada rotação completa do eixo (360°).
O sinal de índice tem duas funções principais:
- Como uma referência zero: Após um período sem tensão, o impulso de índice pode ser utilizado para se deslocar para um ponto zero definido.
- Como impulso de referência: Particularmente para encoders que funcionam a velocidades muito elevadas, o impulso de referência tem uma função de controlo como um impulso de contagem separado para um curso/revolução completa.
Estudo de caso:
É efectuada uma verificação para ver se o número de impulsos contados "normais" entre dois impulsos de índice consecutivos corresponde ao número esperado. Por exemplo, se for utilizado um codificador com uma especificação de 16000 impulsos/revolução e a unidade de avaliação contar menos de 16000 impulsos por rotação completa, ocorreu um erro.
Avaliação de borda / sinal de quadratura
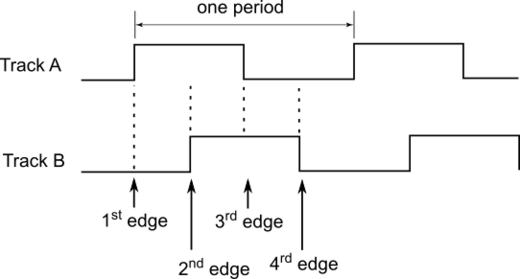
O desvio de sinal de 90° dos sinais de onda quadrada dos canais A e B tem uma vantagem. Para cada faixa e período de sinal, um sinal de onda quadrada tem uma borda de sinal ascendente e uma borda de sinal descendente.
A sequência de bordas para as faixas A e B de um período de sinal é a seguinte:
Borda ascendente da faixa A (1) → após um período de ¼ Borda ascendente da faixa B (2) → após um período de ½ Borda descendente da faixa A (3) → após um período de ¾ Borda descendente da faixa B (4)
Se uma unidade de avaliação avaliar não só o bordo ascendente de uma via, mas também os bordos ascendente e descendente das vias A e B, o número de impulsos pode ser quadruplicado com este método. Isto equivale a uma quadruplicação da precisão sem qualquer alteração estrutural do codificador.
Exemplo:
Se a folha de dados do codificador incremental especificar uma resolução de 1024 ppr, esta será quatro vezes superior com a avaliação de arestas, ou seja, 4096 sinais por rotação e por canal. A avaliação de bordas descrita acima também é chamada de "sinal de quadratura com informação direcional". Uma avaliação de borda pode ser baseada, por exemplo, no circuito integrado LS7083 oferecido pela MEGATRON.
Velocidade máxima e frequência de corte
Os encoders incrementais não podem funcionar a qualquer velocidade. Existem limitações mecânicas e/ou electrónicas.
As limitações mecânicas podem ser determinadas a partir da folha de dados e devem-se às seguintes causas:
- Velocidade máxima do rolamento do veio (apenas se aplica a encoders com o seu próprio rolamento do veio, ver Encoders de veio). A velocidade máxima permitida é frequentemente inferior a 10000 rpm.
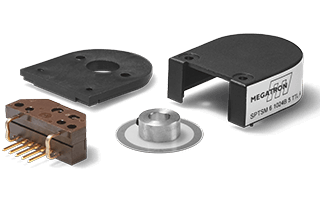
- A excentricidade (desequilíbrio) da mecânica. Nos encoders ópticos, isto é causado principalmente pelo desequilíbrio da roda de codificação. No entanto, a velocidade máxima de funcionamento pode atingir as 60.000 rpm. Os codificadores de kit magnético, por outro lado, não têm normalmente esta limitação.
A limitação eletrónica pode ser calculada: neste caso, o resultado do cálculo é designado por "velocidade de acionamento máxima teórica possível".
- A razão para isto é a frequência de corte da eletrónica. A eletrónica não pode processar uma frequência superior à frequência de corte. Quanto maior for a frequência de corte e menor for a resolução do codificador, maior será a velocidade de atuação teoricamente possível.
A seguinte fórmula pode ser utilizada para calcular a velocidade de atuação máxima teórica a partir da frequência de corte:
\(max. rpm =\frac{\text {frequência de corte} \frac {1} {s} * 60 }{ \text {número de impulsos}}\)
Dois exemplos de como calcular a velocidade de atuação máxima teórica são dados abaixo.
Exemplo 1:
É necessária uma resolução de 512 ppr. A frequência de corte é dada como 100 kHz na folha de dados do codificador. Obtém-se
\({100000 \cdot 1/s\cdot 60 \text{ s} \over 512} = 11718 \text { rpm} \)
Resultado: A velocidade de atuação máxima teórica permitida é de 11718 rpm.
Exemplo 2:
A resolução requerida é de 10000 ppr. A frequência de corte é especificada como 100 kHz na folha de dados do codificador. Resultado: A velocidade de atuação máxima teórica do atuador é de 600 rpm.
\({100000 \cdot 1/s \cdot 60 \text{ s} \over 10000} = 600 \text { rpm} \)
Uma comparação entre a velocidade de atuação máxima teórica e mecanicamente permitida mostra qual delas conta para a aplicação: o menor dos dois valores é relevante!
Tolerâncias e desvios dos encoders incrementais ópticos
Nenhum encoder incremental fornece um sinal perfeito. Para os encoders incrementais ópticos, descrevem-se de seguida as incertezas ou tolerâncias que devem ser consideradas para os sinais destes encoders. O sistema ótico inclui a própria roda do codificador e o módulo ou conjunto do codificador que contém o LED e o fotodetector. Todos estes elementos interagem para produzir algum desvio em relação à forma retangular ideal do sinal e à posição ideal do bordo. Estas tolerâncias são frequentemente descritas na ficha de dados de um codificador incremental ótico e ajudam o utilizador a analisar os dados de medição com maior precisão.
Na maioria dos casos, os sinais dos canais A, B e, se necessário, Z são apresentados sob a forma de uma imagem. As relações são depois explicadas através de exemplos no diagrama ao lado.
Os símbolos têm os seguintes significados:
C corresponde a um período
P corresponde a um período de ½ sinal
S corresponde a ¼ período de sinal
Ф é a referência de fase entre os canais A e B
No caso ideal: C = 2 * P = 4 * S = S1 + S2 + S3 + S4.
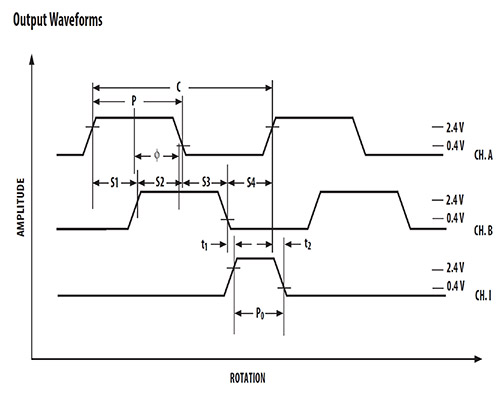
Exemplo para descrever o campo de tolerância de um quarto de período de duração
Um incremento, e portanto um período, consiste idealmente em quatro componentes de sinal equidistantes (C/4). Uma vez que, na prática, um período de sinal não é dividido em quatro partes iguais, descreve-se a relação possível e, portanto, a banda de tolerância das quatro partes de um período de sinal (T) entre si. O termo seguinte descreve que um quarto do período do sinal pode variar num duodécimo do período do sinal:
\(S1,S2,S3,S4 = \frac {C} {4} \pm \frac {C} {12}\)
Exemplo de descrição de um campo de tolerância de meio período
Um incremento, e portanto um período de sinal, consiste idealmente em dois componentes de sinal equidistantes (C/2). Uma vez que um período de sinal nem sempre consiste exatamente em dois pares de ondas de igual comprimento, é descrita a possível relação entre os dois pares de ondas de um período de sinal (T). O termo seguinte descreve que metade de um período ou metade de um período de sinal ou metade de um comprimento de onda pode variar mais ou menos um duodécimo do ideal.
\(P = \frac {C} {2} \pm \frac {C} {12}\)
Descrição da possível deslocação de fase entre os canais A e B
Idealmente, a mudança de fase entre os canais A e B é exatamente de 90° (noventa graus). Os 90° são apresentados na relação C/4. Assim, um quarto de um período de sinal corresponde a 90°. O erro, neste caso, pode ser de ± C/24, ou seja, mais ou menos um vigésimo quarto. Um vinte e quatro avos corresponde a 360°/24, o que corresponde a um possível erro de fase de mais ou menos 15°. Assim, a relação dos incrementos entre os canais A e B pode estar numa gama de 90° ±15° e a referência de fase entre os canais A e B pode estar numa gama de 75°...105°.
\(Ф = \frac {C} {4} \pm \frac {C} {24}\)
Descrição da banda de tolerância do comprimento do impulso de índice (canal Z)
O impulso de índice é emitido uma vez a cada 360° quando o eixo é conduzido continuamente numa direção. Um período corresponde a C. A representação C/4 significa que o impulso de índice é idealmente ¼ do comprimento de um período de sinal. A largura de impulso do impulso de índice pode desviar-se do ideal, isto é, o comprimento de um quarto de período de sinal (=C/4), por mais ou menos um duodécimo de um período de sinal.
Isto significa que a largura do impulso do impulso de índice pode variar entre 1/3 (=C/3) e 1/6 (=C/6) de um período de sinal.
\(Po = \frac {C} {4} \pm \frac {C} {12}\)
Interpolação de seno/cosseno
Quanto maior for o número de impulsos por rotação que são realizados com um codificador ótico, menor será a largura da linha dos incrementos na roda de códigos. No entanto, o sistema ótico de um codificador angular só pode detetar incrementos até uma determinada largura de linha. Por exemplo, uma roda de códigos com 10 mm de diâmetro não pode ter 10.000 linhas devido à sua pequena dimensão. Quando é necessário implementar codificadores incrementais com um diâmetro de caixa pequeno e uma resolução elevada, tal é frequentemente efectuado com base na interpolação seno/cosseno.
Neste método, o sistema ótico do codificador não é utilizado como num codificador incremental ótico convencional, pelo que se verificam mudanças bruscas de estado entre transmissão e interrupção de transmissão, ou reflexão e interrupção de reflexão. Em vez disso, a transição entre zero e a transmissão ou reflexão máxima é tão suave quanto possível. A transição suave resulta numa função sinusoidal do sinal. É necessário um segundo LED e um fototransistor para produzir um sinal cosseno. Os sinais de seno e cosseno são então digitalizados. Normalmente, é utilizada uma taxa de amostragem contínua.
Exemplo:
Se for utilizada uma roda de codificação a partir da qual são obtidos 8 períodos sinusoidais, isto corresponde a uma resolução de 3 bits. No entanto, se este sinal sinusoidal for amostrado com 10 bits, a resolução (de digitalização) é de213 bits, o que equivale a uma resolução de 8192 ppr. A vantagem do princípio é, portanto, óbvia.
Também estão disponíveis codificadores ópticos e magnéticos com saída analógica, fornecendo sinais analógicos de seno e cosseno. Com um codificador deste tipo, é possível a interpolação subsequente.
Interfaces de saída
As caraterísticas dos sinais incrementais (alto-baixo, ligado-desligado, lógica booleana) tornam-nos particularmente adequados para utilização em circuitos digitais. Por conseguinte, muitas séries de encoders incrementais oferecem interfaces que permitem uma fácil integração em tais redes de circuitos:
- OC (coletor aberto)
- Saída de tensão standard ou TTL (lógica de transístor transistorizado)
- PP (Push Pull)
Saída de coletor aberto (OC)
O circuito de coletor aberto é um padrão óbvio para circuitos de saída para sinais incrementais e uma grande vantagem é que permite que a saída seja ligada a um nível de tensão diferente definido pela aplicação. Isto é possível porque não existe uma resistência pull-up integrada no codificador e o coletor é conduzido para fora da caixa (coletor aberto). O transístor actua assim como um interrutor.
O exemplo seguinte aplica-se a um transístor bipolar Si-NPN:
Nível alto na saída do sinal:
- Um nível baixo (<0,7V) na base do transístor bloqueia o transístor e a tensão de alimentação (VSUP) é aplicada ao coletor.
Nível baixo na saída de sinal:
- Quando a base do transístor está alta (>0,7V), a tensão no coletor (VSUP) é puxada para a terra.
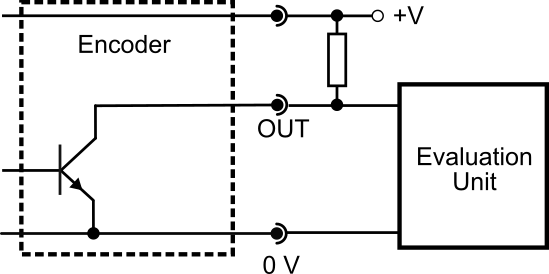
No caso do circuito de coletor aberto, é normalmente necessário ligar uma resistência pull-up entre a tensão de alimentação e as saídas de sinal A, B e Z do codificador (coletor). Isto assegura que os níveis podem ser detectados pelo dispositivo de avaliação como níveis baixos e altos. Um valor típico para uma resistência pull-up pode ser de 4,7 kOhm. A tensão máxima do coletor depende do transístor utilizado e é normalmente especificada na folha de dados do codificador. Uma vez que excede os 50 V, os sinais incrementais com níveis de sinal muito elevados podem ser transmitidos a longas distâncias. Devido à variabilidade da tensão de coletor, a conversão de nível também é possível.
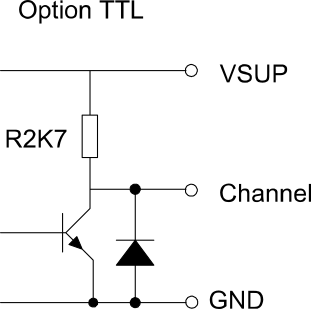
Saída TTL
A saída TTL é muitas vezes referida simplesmente como a saída de tensão. A diferença em relação à saída de coletor aberto é que as resistências de pull-up necessárias já estão integradas na caixa do codificador, pelo que os níveis são fixos. A conversão de nível variável, como acontece com o circuito de coletor aberto, não é, portanto, possível.
Estes níveis são para a lógica TTL padrão:
< 0,4 V para o nível baixo
> 2,4 V para o nível alto
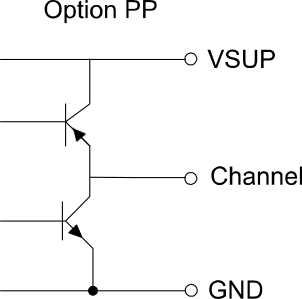
Saída Push / Pull
O circuito de saída push/pull baseia-se num par de transístores complementares (canal n e canal p). Bloqueia alternadamente um dos dois transístores.
Quando o sinal de saída é alto, está ao nível de VSUP e quando é baixo, está aproximadamente à terra. A vantagem de um circuito push-pull é que não são necessárias resistências pull-up ou pull-down adicionais. Se não for necessária uma conversão de nível, os codificadores com circuito de saída push-pull podem ser utilizados como um substituto universal para saídas de coletor aberto e TTL/tensão.
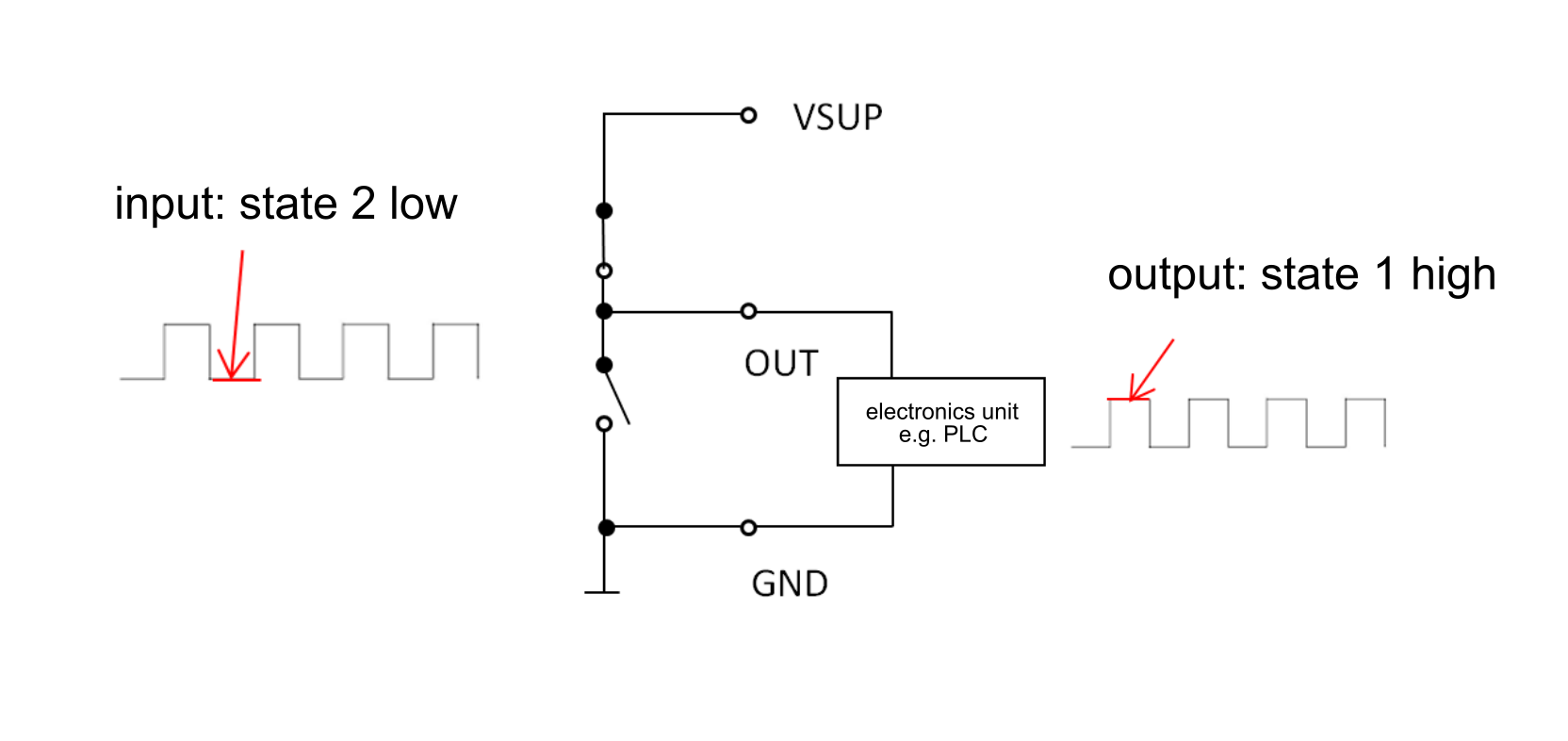
Nível baixo nas entradas do transístor: NPN desactiva e PNP abre
O nível alto é VSUP
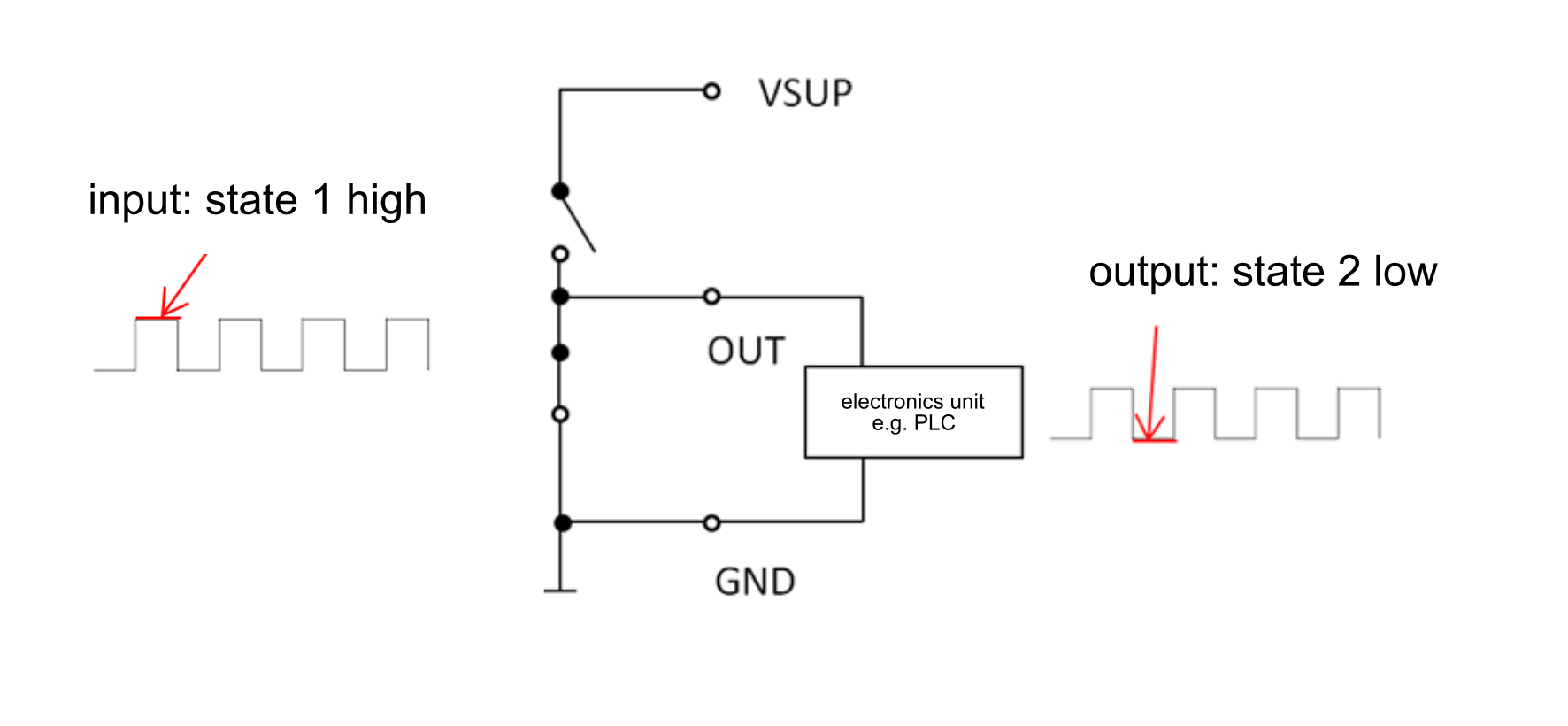
Nível alto nas entradas do transístor: NPN abre e PNP desactiva
Nível baixo aproximadamente à terra





















Os encoders incrementais são utilizados sempre que é necessário medir ângulos, velocidades ou velocidades angulares com elevada exatidão. Os encoders incrementais fornecem sinais de saída sob a forma de impulsos, que são contados por uma unidade de avaliação externa. Os sensores dos produtos de alta qualidade utilizados pela MEGATRON baseiam-se em princípios de medição sem contacto, como a tecnologia de sensores optoelectrónicos e magnéticos (efeito Hall).
Os encoders incrementais ópticos são insensíveis às interferências externas e oferecem a mais elevada precisão para as operações de posicionamento ou de regulação. Os encoders magnéticos são extremamente duráveis e altamente resistentes à vibração. Com uma vasta gama de modelos e opções de saída disponíveis, existe um codificador incremental adequado a quase todas as aplicações.
No entanto, as aplicações especiais requerem frequentemente adaptações técnicas, que a MEGATRON pode efetuar mesmo para quantidades relativamente pequenas. O nosso objetivo é oferecer a cada cliente o produto mais funcional e económico para a sua aplicação. Como parceiro de confiança, apoiamo-lo desde a fase de consulta até ao início da produção em série e até ao fim do ciclo de vida do produto, com elevada fiabilidade de fornecimento e garantia de qualidade.