 EN
EN DE
DE ES
ES FR
FR PT
PT IT
IT










Encoder absoluto
Encoder magnéticos para medição absoluta de ângulos
Guia de Encoders Absolutos
Índice
O que é um encoder absoluto?
Os encoders absolutos são encoders rotativos que medem ângulos, convertem esta informação em sinais eléctricos e emitem-nos como valores absolutos. A utilização de eletrónica para processar o valor medido diferencia-os dos potenciómetros, que também fornecem valores absolutos, mas são componentes passivos sem eletrónica integrada. No caso dos encoders absolutos, existe um ponto zero fixo como ponto de referência para a medição do ângulo, ao qual o valor de saída se refere em qualquer altura. O princípio de um encoder absoluto é fundamentalmente diferente do dos encoders incrementais, por exemplo, em que apenas as alterações angulares (valores relativos) são transmitidas pelo encoder. Os encoders absolutos dividem-se em duas categorias, dependendo da gama angular a ser detectada. Os encoders absolutos que medem ângulos ao longo de várias rotações são designados por encoders multi-voltas e os encoders absolutos que medem ângulos até 360° são designados por encoders de uma volta.
Programação de sinais de encoders absolutos
Os encoders absolutos oferecem inúmeras possibilidades de apresentar os valores angulares medidos sob a forma de uma função eléctrica “sinal de saída”. A eletrónica de muitos encoders é programável e permite que as curvas de saída sejam personalizadas. O exemplo seguinte mostra a programação standard de fábrica de um encoder absoluto analógico: O encoder está programado no sentido de rotação CW com um sinal de saída de 0...10 V (quando o eixo roda no sentido dos ponteiros do relógio) e detecta um ângulo de 0...360°. Quando está a 0°, a saída é de 0 V. Se o eixo rodar 90° no sentido dos ponteiros do relógio, emite um valor de 90°/360° * 10 V = 2,5 V. Enquanto o eixo do encoder não se mover, este valor permanece constante. A ilustração do exemplo 1 mostra a curva de sinal de um encoder absoluto deste tipo.
| Ângulo medido [° graus] | Tensão de saída [Volt] |
| 0° = 0 V | 0 V |
| 360° = 10 V | 10 V |
| 45° = 1.25 V | 1.25 V |
| 90° = 2.5 V | 2.5 V |
| 180° = 5.0 V | 5 V |
Para se ter uma referência à gama completa de saída do sinal, o termo “escala completa” é frequentemente utilizado com a abreviatura “F.S.”. No exemplo acima, F.S. = 10 V. Sem conhecer a tensão máxima, a programação também pode ser feita usando valores percentuais. Por exemplo, 0° corresponde a 0% F.S. (0% do valor máximo, ou seja, 0 V) e 360° corresponde a 100% F.S. (100% do valor máximo, ou seja, 10 V). Desta forma, a função de saída de um sinal pode ser descrita com exatidão sem necessidade de uma representação gráfica:
0° = 0% F.S.
90° = 100% F.S.
180° = 100% F.S.
270° = 0% F.S.
360° = 0% F.S.
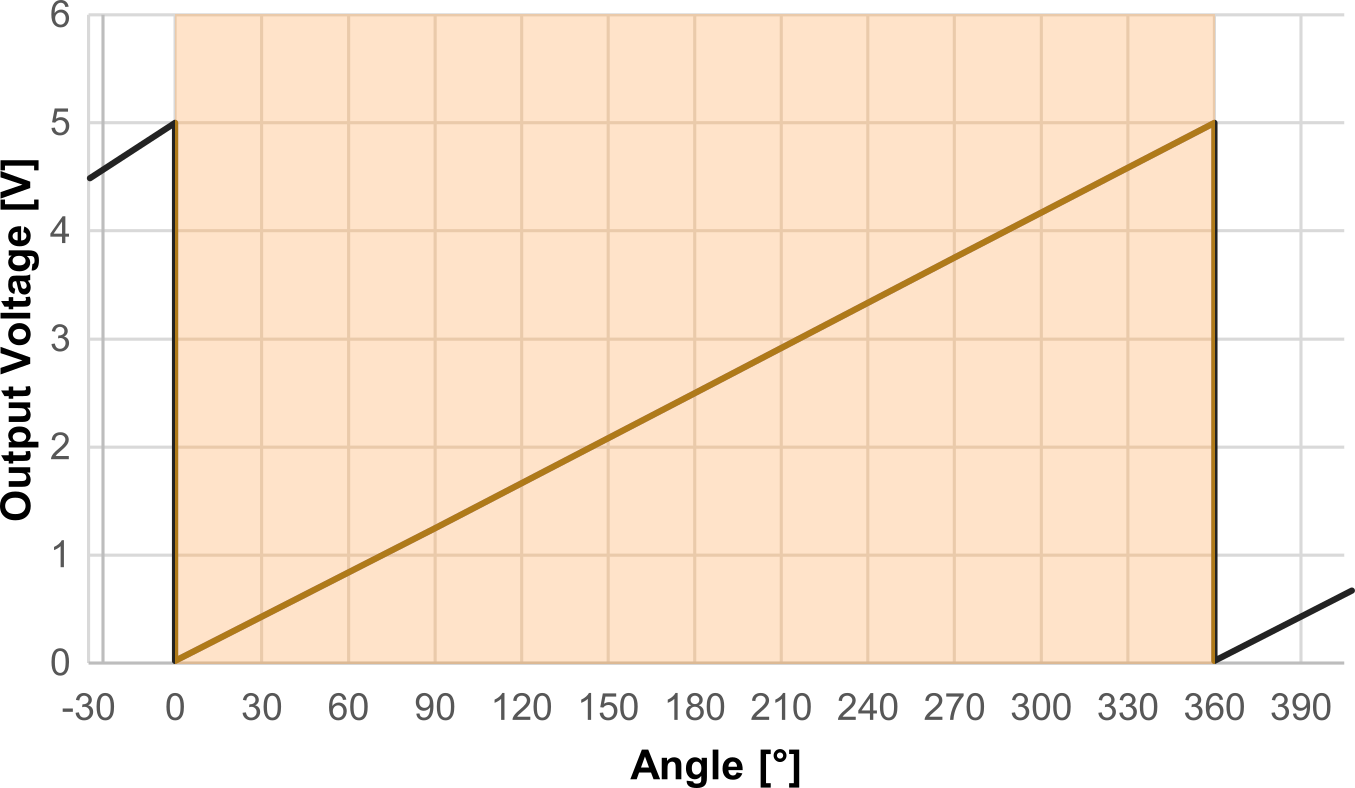
Exemplo 1
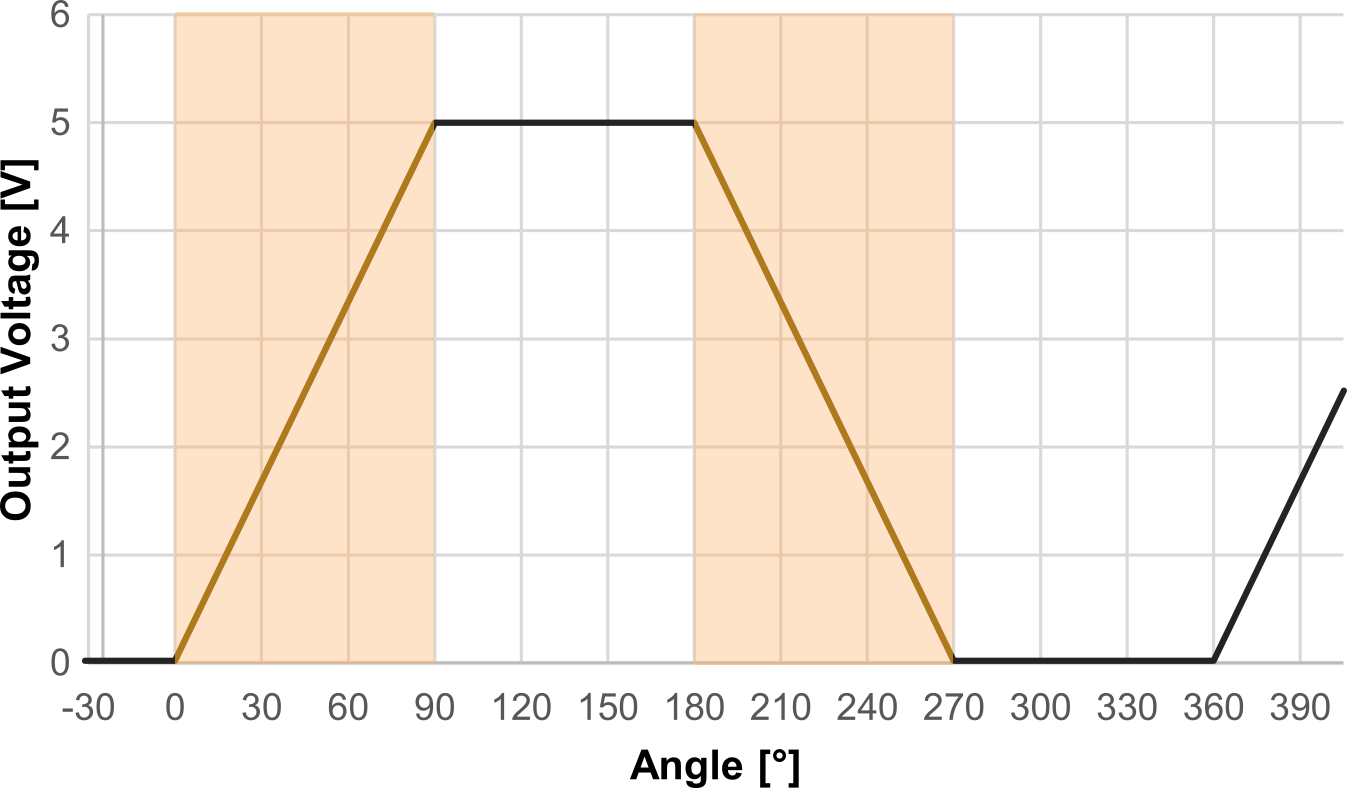
Exemplo 2
A figura mostra a curva de sinal para estes requisitos no exemplo 2. Os sinais de saída dos encoders absolutos também podem ser emitidos através de outras interfaces, por exemplo, como corrente de saída ou por modulação de largura de pulso (PWM).
Encoder rotativo de efeito Hall
O efeito Hall é um fenómeno em que é gerada uma tensão eléctrica num condutor de corrente (elemento Hall) quando este se encontra num campo magnético externo.
O efeito é mostrado no diagrama ao lado e pode ser explicado da seguinte forma: Quando a corrente flui através de um condutor elétrico, os portadores de carga (electrões) movem-se através do condutor. Se for aplicado um campo magnético adicional, por exemplo, por um íman externo, os portadores de carga são desviados perpendicularmente à direção da corrente. Esta é a chamada força de Lorentz: Desvia os portadores de carga quando estes se movem e quando é aplicado um campo magnético externo. Os electrões acumulam-se agora nas extremidades do condutor. A separação de cargas cria uma tensão adicional perpendicular à direção da corrente, chamada tensão Hall.
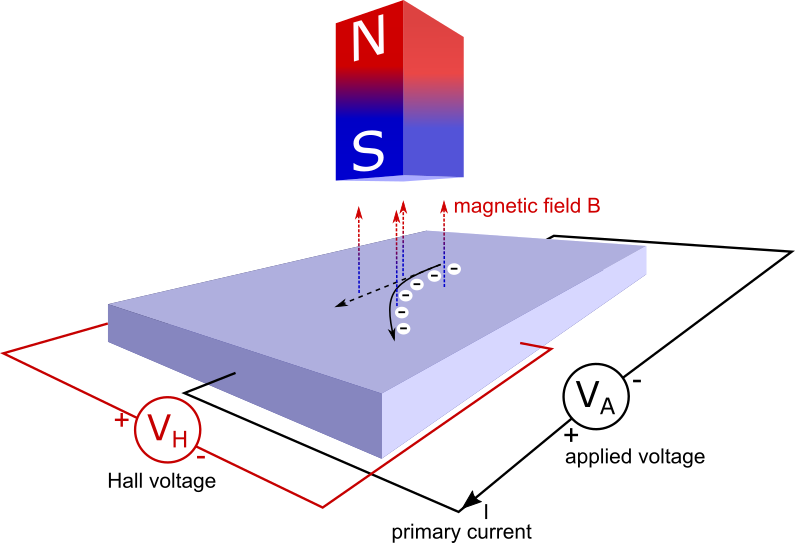
Um campo magnético gera uma tensão Hall num condutor de corrente
Se o campo magnético externo se alterar devido ao movimento do íman, a tensão Hall também se altera - é assim que os sensores podem ser realizados com relativa facilidade. Se, por exemplo, um íman permanente circular diametralmente magnetizado (pólo norte/pólo sul) for colocado num elemento Hall e este íman for sujeito a um movimento de rotação, pode ser medida uma curva de tensão de saída sinusoidal. Se a posição do íman não se alterar, o valor medido também permanece constante. No entanto, um sensor Hall só pode funcionar se também fluir uma corrente, porque, caso contrário, a força de Lorentz não é eficaz. Por isso, os sensores Hall necessitam de corrente durante o funcionamento, mesmo que não haja alteração da posição de medição.
Sensores Hall baseados em gradientes
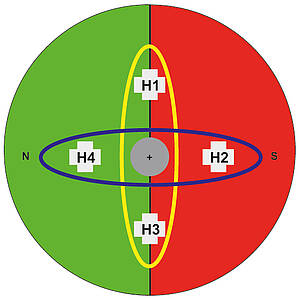
Em princípio, os campos magnéticos externos podem interferir com a tecnologia Hall se não forem tomadas precauções. Atualmente, são utilizados os chamados sensores Hall baseados em gradientes, que são largamente insensíveis a tais interferências.
O princípio desta variante particular é que dois ou mais sensores Hall são colocados próximos uns dos outros. O íman de medição, que está muito próximo destes dois sensores, cria uma diferença nos sinais dos dois sensores porque a curvatura do campo é relativamente forte. No entanto, um campo de interferência externo, que normalmente tem uma ligeira curvatura, é "visto" por ambos os sensores da mesma forma. Se apenas a diferença entre os dois sensores (o gradiente) for avaliada, então praticamente apenas o íman de medição é percebido e o sistema de medição é, portanto, muito robusto a campos de interferência externos.
Resolução
A maioria dos encoders Hall são encoders digitais e processam sinais de medição com uma determinada resolução. A informação é processada com uma precisão que corresponde ao número de bits. Quanto maior for este valor, mais finos são os sinais que podem ser processados. Por isso, as curvas de saída analógicas dos dispositivos digitais têm sempre uma gradação fina, cujo nível é determinado pela resolução. As resoluções típicas são 10-bit, 12-bit ou 14-bit, dependendo do modelo do codificador. Por exemplo, a resolução angular é de 0,088° com 12 bits e 0,022° com 14 bits. Para determinar estes valores, a seguinte observação simples ajuda:
- A resolução é utilizada para calcular o número de mudanças de estado que podem ser apresentadas: 1 bit corresponde a 2 mudanças de estado (uma vez que21 = 2), 12 bits correspondem a 4096 mudanças de estado (uma vez que212 = 4096)
- O número de mudanças de estado é dividido por toda a gama do ângulo elétrico de rotação
Para calcular a resolução angular, o ângulo elétrico de rotação efetivo deve ser dividido pelo número de estados possíveis:
\(\text {Resolução angular em graus} =\frac {360°} {2^\text {número de bits}}\)
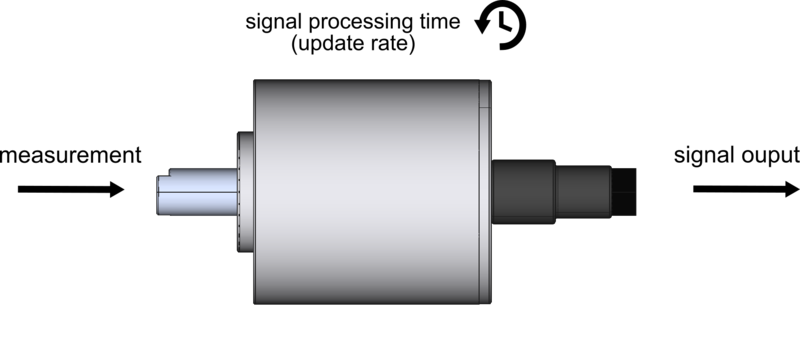
Taxa de atualização
Uma vez que muitos codificadores Hall estão equipados com circuitos integrados digitais (ICs) que enviam sempre os seus sinais com um certo atraso, a taxa de atualização em milissegundos deve ser tida em conta na aplicação. A taxa de atualização é o tempo entre a aquisição do valor medido e a saída do sinal no codificador angular. Normalmente, situa-se entre 96 µs e 600 µs para os encoders magnéticos com processamento de sinal digital, mas pode ir até 3 ms para alguns encoders multivoltas.
Se a taxa de atualização for aumentada, isto resulta num maior consumo de corrente do codificador angular. Alguns codificadores angulares também podem ser encomendados com uma taxa de atualização reduzida, por exemplo, 600 µs em vez de 200 µs, para reduzir o consumo de energia. Estes codificadores angulares são então particularmente adequados para utilização numa aplicação alimentada por bateria com baixo consumo de energia.
Se for necessária uma taxa de atualização diferente do codificador angular, esta deve ser encomendada de fábrica. Esta caraterística não pode ser alterada no terreno. A taxa de atualização não deve ser confundida com a taxa de amostragem.
Precisão - Linearidade absoluta
O cálculo do possível desvio angular de um codificador é complexo e depende de muitos factores, tais como influências ambientais (temperatura), factores mecânicos (folga dos rolamentos), tolerâncias dos componentes electrónicos, etc. Para determinar o erro angular de um encoder absoluto de forma fiável e rápida, um cálculo baseado na linearidade absoluta provou ser prático. A linearidade absoluta descreve o desvio percentual máximo possível da função de saída do sinal (o resultado da medição) de uma linha reta ideal. No entanto, estas especificações aplicam-se sob as seguintes condições:
- Funcionamento do veio num único sentido de rotação
- Funcionamento à temperatura ambiente
- Referência a um ângulo de rotação eletricamente eficaz especificado na folha de dados
- A linearidade absoluta é uma consideração do "pior caso"
- Na prática, o erro angular efetivo será inferior
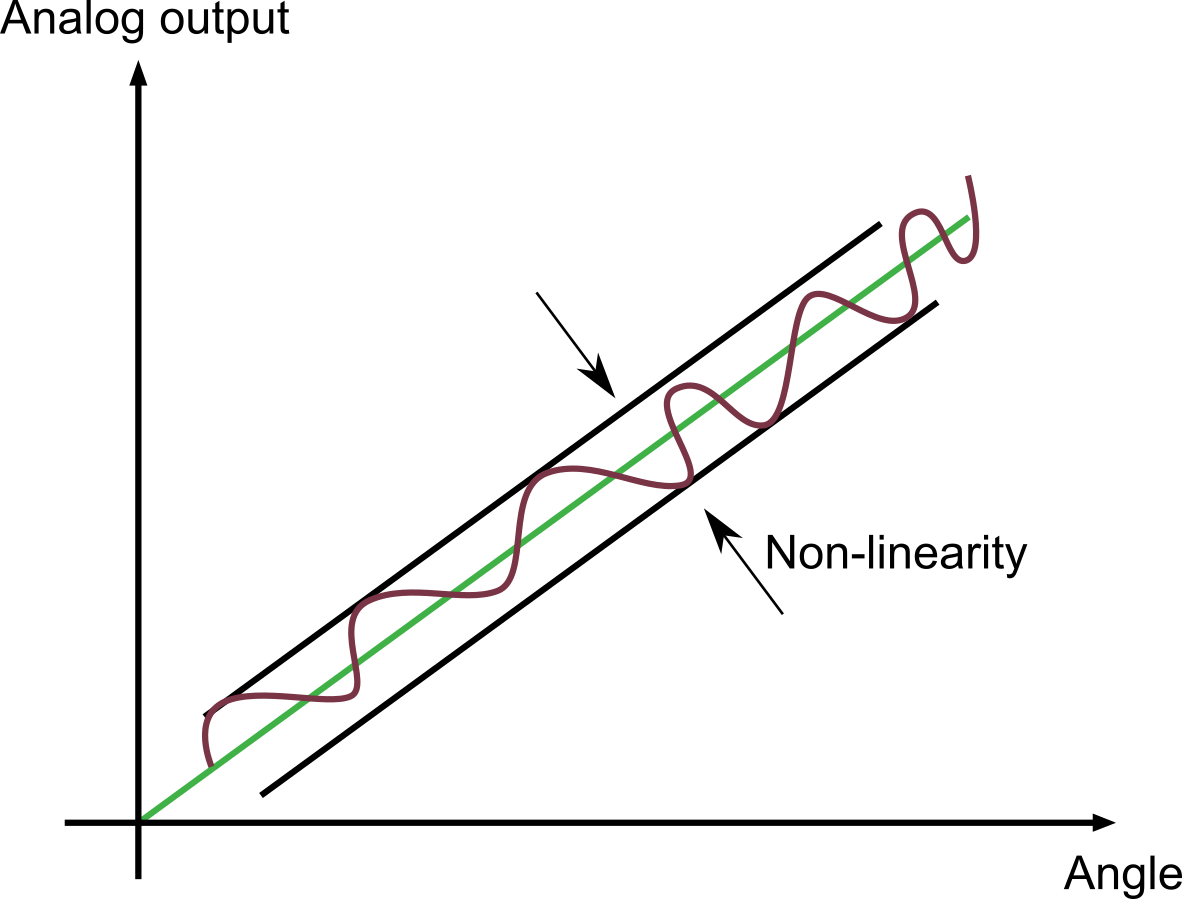
A linearidade absoluta descreve o desvio do sinal (vermelho) de uma linha reta ideal (verde) que passa pelo ponto zero.
O erro angular é reproduzível para o codificador individual. Isto significa que, para um determinado ângulo de rotação, o erro será sempre aproximadamente o mesmo. A elevada repetibilidade de um encoder absoluto sem contacto permite, portanto, que a função de saída do sinal seja compensada em relação a uma função de calibração armazenada numa unidade de avaliação, de modo a reduzir o erro angular do encoder. A informação sobre a linearidade absoluta é um valor fixo na folha de dados dos encoders absolutos.
A informação de linearidade absoluta na folha de dados de um kit de codificador (sem eixo) é dada sob a condição de que o eixo central do íman esteja alinhado com o eixo central do codificador. Algumas folhas de dados de kits magnéticos também fornecem informações sobre como o valor da linearidade absoluta muda quando o íman é posicionado excentricamente em relação ao eixo central.
Encoder absoluto de uma volta e multivoltas
Codificador absoluto de volta única
Os encoders de volta única são encoders absolutos e só são adequados para medir ângulos ≤ 360° porque o seu sinal de saída é o mesmo que 0° após uma volta completa. A maioria dos encoders absolutos de volta única sem contacto mede, portanto, uma gama de ângulos de 0° a um máximo de 360°. Esta categoria também inclui modelos com uma gama angular limitada, como ±45°.
Codificador absoluto multivolta
Os encoders multivoltas são capazes de medir ângulos para além de zero, ou seja, para além de 360°. Isto é possível porque o sistema de medição é capaz de contar o número de rotações. Muitas vezes, o sinal aumenta continuamente ao longo de toda a gama angular especificada. O encoder absoluto multi-voltas ETA25PM da MEGATRON, por exemplo, é capaz de medir gamas angulares até um máximo de 72000° (até 200 rotações do veio) e esta gama pode ser limitada por programação. A definição de fábrica é 3600° (10 rotações). No entanto, ao medir ângulos >360°, o sensor pode ser rodado até um máximo de ±179° no estado desenergizado, caso contrário o sensor perderá o seu valor medido.

Para evitar esta situação, estão disponíveis encoders True-Power-On. Estes têm a capacidade de emitir a posição angular corretamente em qualquer caso, mesmo após uma rotação em estado desenergizado. Uma variante possível é a utilização de uma redução de engrenagem, de modo a que o eixo rode várias vezes, mas o íman apenas rode um máximo de 360° dentro do intervalo de regulação. O nosso guia para encoders multi-voltas fornece informações mais detalhadas sobre este tópico..
Saídas de sinais eléctricos
Os encoders absolutos têm sinais de saída analógicos e digitais.
Saídas de sinal analógico para encoders absolutos:
- Tensão
- Corrente
- PWM (modulação por largura de pulso)
Saídas de sinal digital para encoders absolutos:
- SPI
- SSI
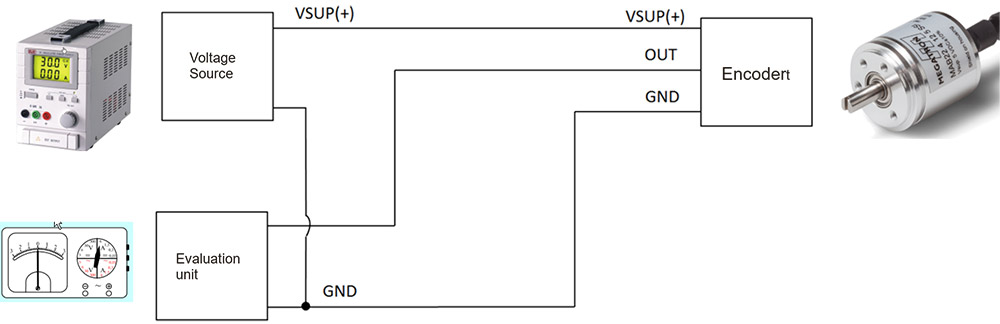
Saída de corrente e tensão
As saídas analógicas continuam a desempenhar um papel importante no mercado dos codificadores. Por isso, a maior parte das séries são oferecidas também com estas saídas. Os encoders absolutos MEGATRON com sinais de saída analógicos são concebidos basicamente em tecnologia de 3 fios, exceto se oferecerem redundância. As duas ligações para a tensão de alimentação (VSUP) e o sinal de saída (OUT) têm uma terra comum. Muitos encoders absolutos sem contacto com saídas de sinal redundantes são isolados galvanicamente e, portanto, oferecem tensões de alimentação, terras e saídas de sinal separadas por ramo de sinal.
Deteção externa de rutura de fio
Para gerar uma deteção externa de rutura de fio através de uma unidade de avaliação, o sinal de saída do encoder angular não deve ser zero durante o funcionamento, independentemente do ângulo, uma vez que 0 V de tensão de saída ou 0 mA de corrente de saída são os indicadores de uma rutura de fio. Para todos os encoders absolutos MEGATRON com saída de corrente, uma deteção externa de rutura de fio pode ser realizada por programação de fábrica, uma vez que o ângulo medido é sempre emitido numa gama de 4...20 mA.
Para uma saída de tensão, dispomos de séries no nosso programa que oferecem esta função de fábrica. No entanto, isto não é possível em todos os modelos. Por favor, contacte-nos se não tiver a certeza.
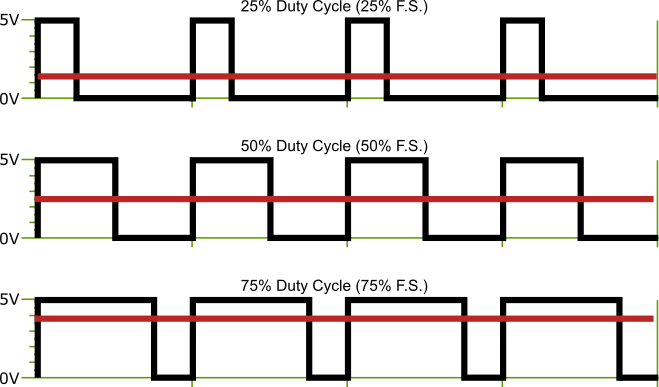
Interface PWM
Com a saída PWM, o ângulo medido não é proporcional à amplitude do sinal, mas sim à largura do impulso. A vantagem em relação às saídas de corrente ou de tensão é que esta forma de saída de sinal é largamente insensível às interferências electromagnéticas (EMI), uma vez que as EMI afectam normalmente a amplitude do sinal e não a frequência (por exemplo, rádio AM/FM). No entanto, o sinal deve ser detectado numa unidade de avaliação externa concebida para PWM.
A largura de impulso dos encoders MEGATRON varia entre 10% (0% F.S.) e 90% (100% F.S.). A frequência portadora é de 244 Hz.
Interfaces digitais
Os microcontroladores fornecem frequentemente entradas para sinais digitais com base nos formatos SPI e SSI. Os encoders absolutos são oferecidos com estes interfaces digitais para assegurar uma elevada compatibilidade com muitos microcontroladores no mercado. Está para além do âmbito deste manual descrever em pormenor os interfaces digitais e as suas caraterísticas específicas. A explicação que se segue pretende ser apenas uma breve visão geral.
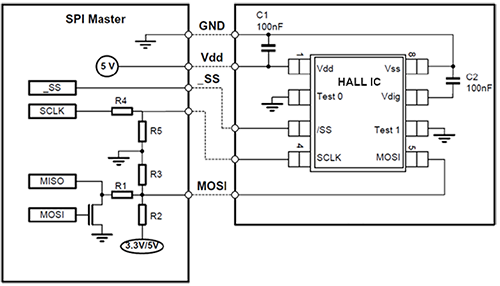
SPI (Interface Periférico em Série)
A interface SPI baseia-se num protocolo BUS série mestre/escravo desenvolvido pela Motorola. A comunicação é efectuada através das linhas de dados:
- MOSI (Master Out → Slave In)
- MISO (Master In → Slave Out)
- SCK (Serial Clock) (= relógio do barramento/relógio de deslocamento)
Para além destas três linhas, é necessária uma linha chamada "Slave Select (SS)" ou "Chip Select (CS)" para cada escravo. É de notar que este formato não é adequado para a comunicação no terreno, uma vez que o comprimento do cabo entre o master e o slave não deve exceder 0,6 m. Para mais informações sobre os leitores magnéticos MEGATRON com interface SPI, contacte-nos.
SSI (Interface Série Síncrona)
A interface SSI é uma interface amplamente utilizada para a comunicação de dados em série. É particularmente adequada para a comunicação digital de encoders absolutos no campo, onde os valores medidos têm de ser transmitidos através de longos comprimentos de cabo entre o encoder e a unidade de avaliação. A transmissão de dados (relógio e dados) é efectuada através de quatro linhas, cada uma das quais com dois pares de sinais (transmissão simétrica de sinais em fase e 180° em fase). Se os sinais de um par de sinais forem sobrepostos por uma perturbação no caminho de transmissão entre o slave e o master, esta perturbação pode ser removida dos dois pares de sinais na unidade de avaliação por subtração. Os cabos de sinal de par trançado com pares individualmente blindados são particularmente adequados para a transmissão fiável de sinais de medição a longas distâncias. Para mais informações sobre a comunicação SSI com encoders MEGATRON, por favor contacte-nos.
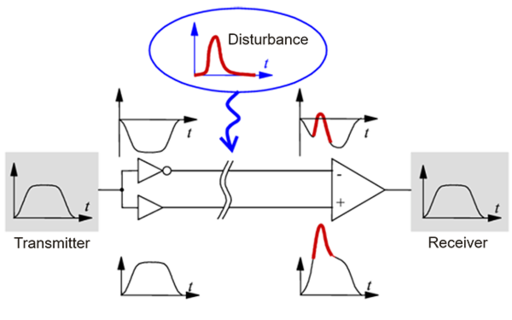
Conceito de eliminação de falhas mediante SSI
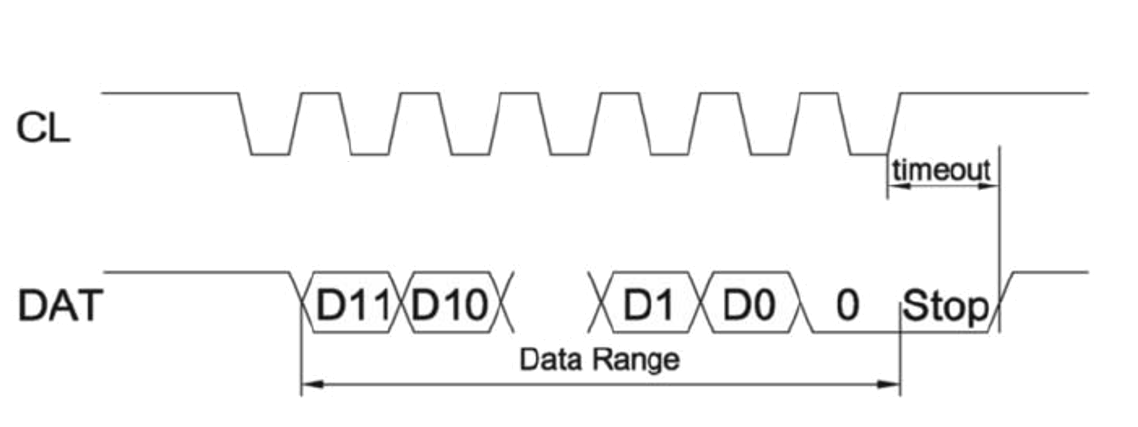
Transmissão de dados nos dois canais Clock e Data










Os encoders absolutos são encoders rotativos que medem posições angulares numa aplicação, convertem esta informação angular em sinais eléctricos e emitem-nos como valores absolutos. As tecnologias de sensores magnéticos baseadas no efeito Hall fornecem excelentes resultados de medição com as vantagens bem conhecidas do princípio de medição sem contacto e a vida útil praticamente ilimitada da tecnologia de sensores.
Graças à grande variedade de saídas de sinais eléctricos, ligações e designs mecânicos, está disponível uma aquisição de valores de medição fiável, reproduzível e precisa para quase todas as aplicações. A gama de medição angular de um encoder absoluto é de importância vital. Neste caso, os encoders de uma volta cobrem gamas angulares até 360 graus e os encoders multi-voltas cobrem ângulos maiores. Deve ser feita uma menção especial à possibilidade de programar uma curva de saída de valor absoluto específica para o cliente.
Tendo em conta todos os parâmetros possíveis, desenvolvemos a melhor solução de produto possível em resposta ao seu pedido. Porque nas aplicações mais exigentes, muitas vezes é necessária uma adaptação técnica do produto. A MEGATRON é o seu especialista para estes casos e acompanha-o como parceiro fiável a longo prazo com produtos de qualidade garantida e elevada fiabilidade de fornecimento, desde a consulta até à realização, passando pela produção em série e até ao “fim de vida” da sua aplicação.